Jin Zhang, Haiyun Xu, Bin Ba, Jianhui Wang, Chunxiao Jian
{"title":"使用考虑相互耦合的三个均匀线性阵列估计共线性阵列的到达方向","authors":"Jin Zhang, Haiyun Xu, Bin Ba, Jianhui Wang, Chunxiao Jian","doi":"10.1049/rsn2.12537","DOIUrl":null,"url":null,"abstract":"<p>Nowadays, sparse arrays have been a focus for direction-of-arrival (DOA). The existing arrays can achieve high degree of freedom (DOF) bigger than the number of sensors when using the spatial smoothing methods. However, the small inter-element spacing degrades the DOA estimation accuracy when facing severe mutual coupling. In order to alleviate mutual coupling, a coprime linear array using three uniform linear arrays (CLA-U3) is proposed. The expression of sensor locations is given, and the analysis of DOF is considered. The minimum subarray inter-element spacing in CLA-U3 is bigger than that of the existing arrays, which means that CLA-U3 can be less sensitive to mutual coupling. Moreover, the difference co-subarrays can fill each other's holes, so CLA-U3 and other sparse arrays composed of three subarrays have close DOF. Simulation experiments prove the favourable performance of DOA estimation.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 6","pages":"866-875"},"PeriodicalIF":1.4000,"publicationDate":"2024-02-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12537","citationCount":"0","resultStr":"{\"title\":\"Direction-of-arrival estimation in coprime linear array using three uniform linear arrays considering mutual coupling\",\"authors\":\"Jin Zhang, Haiyun Xu, Bin Ba, Jianhui Wang, Chunxiao Jian\",\"doi\":\"10.1049/rsn2.12537\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Nowadays, sparse arrays have been a focus for direction-of-arrival (DOA). The existing arrays can achieve high degree of freedom (DOF) bigger than the number of sensors when using the spatial smoothing methods. However, the small inter-element spacing degrades the DOA estimation accuracy when facing severe mutual coupling. In order to alleviate mutual coupling, a coprime linear array using three uniform linear arrays (CLA-U3) is proposed. The expression of sensor locations is given, and the analysis of DOF is considered. The minimum subarray inter-element spacing in CLA-U3 is bigger than that of the existing arrays, which means that CLA-U3 can be less sensitive to mutual coupling. Moreover, the difference co-subarrays can fill each other's holes, so CLA-U3 and other sparse arrays composed of three subarrays have close DOF. Simulation experiments prove the favourable performance of DOA estimation.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":\"18 6\",\"pages\":\"866-875\"},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2024-02-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12537\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12537\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12537","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
摘要
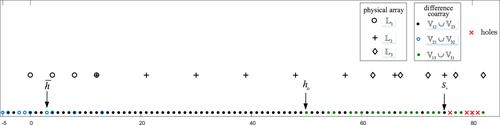
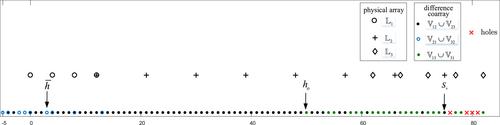
如今,稀疏阵列已成为到达方向(DOA)的焦点。使用空间平滑方法时,现有阵列可以实现大于传感器数量的高自由度(DOF)。然而,当面临严重的相互耦合时,较小的元件间距会降低 DOA 估计精度。为了减轻相互耦合,提出了使用三个均匀线性阵列的共轭线性阵列(CLA-U3)。给出了传感器位置的表达式,并考虑了 DOF 分析。CLA-U3 的最小子阵列元素间距大于现有阵列,这意味着 CLA-U3 可以降低对相互耦合的敏感性。此外,不同的共子阵列可以相互填补对方的空洞,因此 CLA-U3 和其他由三个子阵列组成的稀疏阵列具有接近的 DOF。仿真实验证明了 DOA 估计的良好性能。
Direction-of-arrival estimation in coprime linear array using three uniform linear arrays considering mutual coupling
Nowadays, sparse arrays have been a focus for direction-of-arrival (DOA). The existing arrays can achieve high degree of freedom (DOF) bigger than the number of sensors when using the spatial smoothing methods. However, the small inter-element spacing degrades the DOA estimation accuracy when facing severe mutual coupling. In order to alleviate mutual coupling, a coprime linear array using three uniform linear arrays (CLA-U3) is proposed. The expression of sensor locations is given, and the analysis of DOF is considered. The minimum subarray inter-element spacing in CLA-U3 is bigger than that of the existing arrays, which means that CLA-U3 can be less sensitive to mutual coupling. Moreover, the difference co-subarrays can fill each other's holes, so CLA-U3 and other sparse arrays composed of three subarrays have close DOF. Simulation experiments prove the favourable performance of DOA estimation.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
