{"title":"A robot-assisted adaptive communication recovery method in disaster scenarios","authors":"Kuangrong Hao, Chenwei Zhao, Xiaoyan Liu","doi":"10.1007/s40747-023-01231-z","DOIUrl":null,"url":null,"abstract":"Abstract Communication recovery is necessary for rescue and reconstruction scenarios including earthquakes, typhoons, floods, etc. The rapid and stable communication link can provide efficient victims’ real-time information for the rescue process. However, traditional centralized communication links cannot traverse the further victims with information-sharing requirements. And the even communication link distribution leads to a load burden on the crowded victim area. Thus, we propose a three-layer architecture consisting of the emergency communication vehicle, backbone links, and branch links to rapidly recover communication via mobile robots. Then, considering victims’ distribution, an improved MaxMin distance algorithm is presented as the basis of robot dispatch. The relay probability of the link is also estimated with closed formulae. Finally, simulation results verify that our proposed algorithm can recover communication with lower delay and higher packet delivery ratio.","PeriodicalId":10524,"journal":{"name":"Complex & Intelligent Systems","volume":"22 1","pages":"0"},"PeriodicalIF":4.6000,"publicationDate":"2023-09-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Complex & Intelligent Systems","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s40747-023-01231-z","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
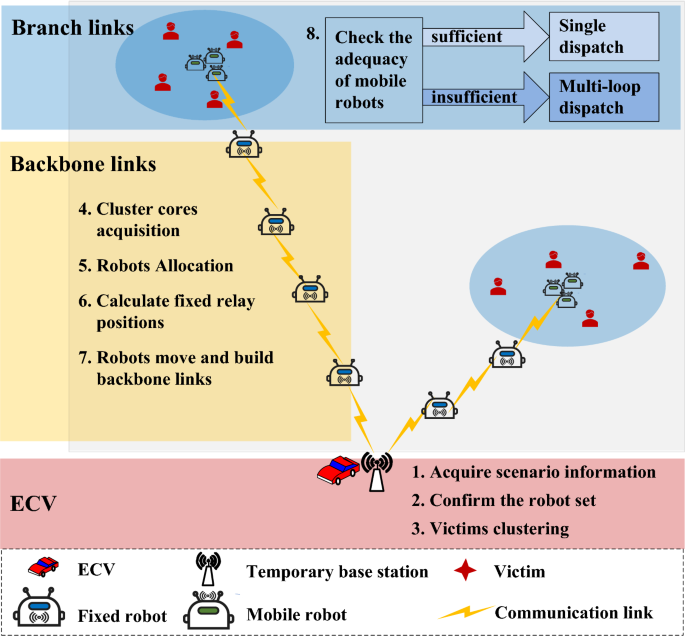
Abstract Communication recovery is necessary for rescue and reconstruction scenarios including earthquakes, typhoons, floods, etc. The rapid and stable communication link can provide efficient victims’ real-time information for the rescue process. However, traditional centralized communication links cannot traverse the further victims with information-sharing requirements. And the even communication link distribution leads to a load burden on the crowded victim area. Thus, we propose a three-layer architecture consisting of the emergency communication vehicle, backbone links, and branch links to rapidly recover communication via mobile robots. Then, considering victims’ distribution, an improved MaxMin distance algorithm is presented as the basis of robot dispatch. The relay probability of the link is also estimated with closed formulae. Finally, simulation results verify that our proposed algorithm can recover communication with lower delay and higher packet delivery ratio.
期刊介绍:
Complex & Intelligent Systems aims to provide a forum for presenting and discussing novel approaches, tools and techniques meant for attaining a cross-fertilization between the broad fields of complex systems, computational simulation, and intelligent analytics and visualization. The transdisciplinary research that the journal focuses on will expand the boundaries of our understanding by investigating the principles and processes that underlie many of the most profound problems facing society today.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
