Stefan Larsson, Mia Liinason, Laetitia Tanqueray, Ginevra Castellano
{"title":"Towards a Socio-Legal Robotics: A Theoretical Framework on Norms and Adaptive Technologies","authors":"Stefan Larsson, Mia Liinason, Laetitia Tanqueray, Ginevra Castellano","doi":"10.1007/s12369-023-01042-9","DOIUrl":null,"url":null,"abstract":"Abstract While recent progress has been made in several fields of data-intense AI-research, many applications have been shown to be prone to unintendedly reproduce social biases, sexism and stereotyping, including but not exclusive to gender. As more of these design-based, algorithmic or machine learning methodologies, here called adaptive technologies , become embedded in robotics, we see a need for a developed understanding of what role social norms play in social robotics, particularly with regards to fairness. To this end, we (i) we propose a framework for a socio-legal robotics , primarily drawn from Sociology of Law and Gender Studies. This is then (ii) related to already established notions of acceptability and personalisation in social robotics, here with a particular focus on (iii) the interplay between adaptive technologies and social norms. In theorising this interplay for social robotics, we look not only to current statuses of social robots, but draw from identified AI-methods that can be seen to influence robotics in the near future. This theoretical framework, we argue, can help us point to concerns of relevance for questions of fairness in human–robot interaction.","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"87 1","pages":"0"},"PeriodicalIF":3.7000,"publicationDate":"2023-10-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s12369-023-01042-9","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
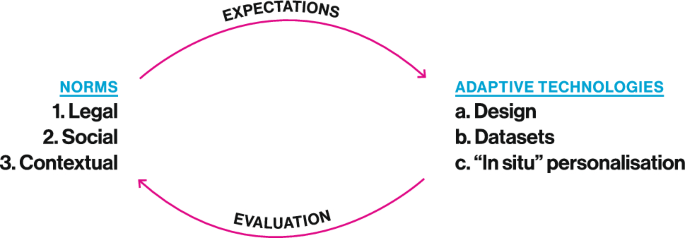
Abstract While recent progress has been made in several fields of data-intense AI-research, many applications have been shown to be prone to unintendedly reproduce social biases, sexism and stereotyping, including but not exclusive to gender. As more of these design-based, algorithmic or machine learning methodologies, here called adaptive technologies , become embedded in robotics, we see a need for a developed understanding of what role social norms play in social robotics, particularly with regards to fairness. To this end, we (i) we propose a framework for a socio-legal robotics , primarily drawn from Sociology of Law and Gender Studies. This is then (ii) related to already established notions of acceptability and personalisation in social robotics, here with a particular focus on (iii) the interplay between adaptive technologies and social norms. In theorising this interplay for social robotics, we look not only to current statuses of social robots, but draw from identified AI-methods that can be seen to influence robotics in the near future. This theoretical framework, we argue, can help us point to concerns of relevance for questions of fairness in human–robot interaction.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
