Francisco Vieira, João Pagaimo, Hugo Magalhães, Jorge Ambrósio, Aurélio Araújo
{"title":"A peridynamics approach to flexible multibody dynamics for fracture analysis of mechanical systems","authors":"Francisco Vieira, João Pagaimo, Hugo Magalhães, Jorge Ambrósio, Aurélio Araújo","doi":"10.1007/s11044-023-09948-y","DOIUrl":null,"url":null,"abstract":"Abstract The classical theory of continuum mechanics is formulated using partial differential equations (PDEs) that fail to describe structural discontinuities, such as cracks. This limitation motivated the development of peridynamics, reformulating the classical PDEs into integral-differential equations. In this theory, each material point interacts with its neighbours inside a characteristic length-scale through bond-interaction forces. However, while peridynamics can simulate complex multi-physics phenomena, its integration in the study of mechanical systems is still limited. This work presents a methodology that incorporates a peridynamics formulation into a planar multibody dynamics (MBD) formulation to allow the integration of flexible structures described by peridynamics into mechanical systems. A flexible body is described by a collection of point masses, in analogy with the meshless collocation scheme commonly used for peridynamics discretisations. Each point mass interacts with other point masses through nonlinear forces governed by a bond-based peridynamics (BBPD) formulation. The virtual bodies methodology enables the definition of kinematic joints connecting the flexible body with the neighbouring bodies. The implementation of the methodology proposed is illustrated using various mechanisms with different levels of complexity. Notched plates subjected to different loading conditions are compared with the results presented in the literature of the peridynamics field. The deformations of a flexible slider-crank mechanism compare well with the results obtained using a classical flexible MBD formulation. Additionally, three scenarios involving a rotating pendulum illustrate how the methodology proposed allows simulating impact scenarios. The results demonstrate how this methodology is capable to successfully simulate highly nonlinear phenomena, including crack propagation, in a multibody framework.","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"41 9","pages":"0"},"PeriodicalIF":2.4000,"publicationDate":"2023-11-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s11044-023-09948-y","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
引用次数: 0
Abstract
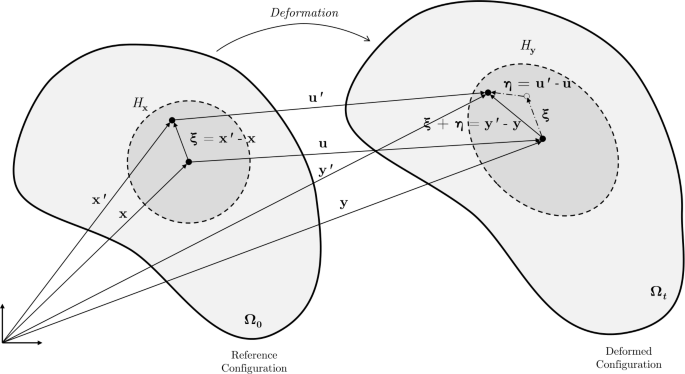
Abstract The classical theory of continuum mechanics is formulated using partial differential equations (PDEs) that fail to describe structural discontinuities, such as cracks. This limitation motivated the development of peridynamics, reformulating the classical PDEs into integral-differential equations. In this theory, each material point interacts with its neighbours inside a characteristic length-scale through bond-interaction forces. However, while peridynamics can simulate complex multi-physics phenomena, its integration in the study of mechanical systems is still limited. This work presents a methodology that incorporates a peridynamics formulation into a planar multibody dynamics (MBD) formulation to allow the integration of flexible structures described by peridynamics into mechanical systems. A flexible body is described by a collection of point masses, in analogy with the meshless collocation scheme commonly used for peridynamics discretisations. Each point mass interacts with other point masses through nonlinear forces governed by a bond-based peridynamics (BBPD) formulation. The virtual bodies methodology enables the definition of kinematic joints connecting the flexible body with the neighbouring bodies. The implementation of the methodology proposed is illustrated using various mechanisms with different levels of complexity. Notched plates subjected to different loading conditions are compared with the results presented in the literature of the peridynamics field. The deformations of a flexible slider-crank mechanism compare well with the results obtained using a classical flexible MBD formulation. Additionally, three scenarios involving a rotating pendulum illustrate how the methodology proposed allows simulating impact scenarios. The results demonstrate how this methodology is capable to successfully simulate highly nonlinear phenomena, including crack propagation, in a multibody framework.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
