{"title":"Actuator-level motion and contact episode learning and classification using adaptive resonance theory","authors":"Vinzenz Bargsten, Frank Kirchner","doi":"10.1007/s11370-023-00481-7","DOIUrl":null,"url":null,"abstract":"Abstract Several methods exist to detect and distinguish collisions of robotic systems with their environment, since this information is a critical dependency of many tasks. These methods are prevalently based on thresholds in combination with filters, models, or offline trained machine learning models. To improve the adaptation and thereby enable a more autonomous operation of robots in new environments, this work evaluates the applicability of an incremental learning approach. The method addresses online learning and recognition of motion and contact episodes of robotic systems from proprioceptive sensor data using machine learning. The objective is to learn new category templates representing previously encountered situations of the actuators and improve them based on newly gathered similar data. This is achieved using an artificial neural network based on adaptive resonance theory (ART). The input samples from the robot’s actuator measurements are preprocessed into frequency spectra. This enables the ART neural network to learn incrementally recurring episodic patterns from these preprocessed data. An evaluation based on preliminary experimental data from a grasping motion of a humanoid robot’s arm encountering contacts is presented and suggests that this is a promising approach.","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"47 1","pages":"0"},"PeriodicalIF":4.3000,"publicationDate":"2023-09-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s11370-023-00481-7","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
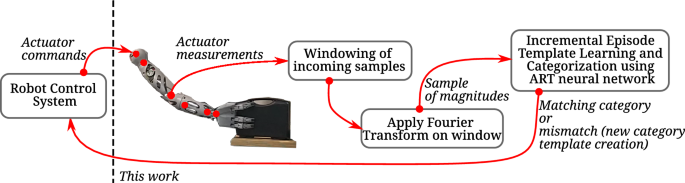
Abstract Several methods exist to detect and distinguish collisions of robotic systems with their environment, since this information is a critical dependency of many tasks. These methods are prevalently based on thresholds in combination with filters, models, or offline trained machine learning models. To improve the adaptation and thereby enable a more autonomous operation of robots in new environments, this work evaluates the applicability of an incremental learning approach. The method addresses online learning and recognition of motion and contact episodes of robotic systems from proprioceptive sensor data using machine learning. The objective is to learn new category templates representing previously encountered situations of the actuators and improve them based on newly gathered similar data. This is achieved using an artificial neural network based on adaptive resonance theory (ART). The input samples from the robot’s actuator measurements are preprocessed into frequency spectra. This enables the ART neural network to learn incrementally recurring episodic patterns from these preprocessed data. An evaluation based on preliminary experimental data from a grasping motion of a humanoid robot’s arm encountering contacts is presented and suggests that this is a promising approach.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
