Marc Dalmasso, J. E. Domínguez-Vidal, Iván J. Torres-Rodríguez, Pablo Jiménez, Anaís Garrell, Alberto Sanfeliu
{"title":"Shared Task Representation for Human–Robot Collaborative Navigation: The Collaborative Search Case","authors":"Marc Dalmasso, J. E. Domínguez-Vidal, Iván J. Torres-Rodríguez, Pablo Jiménez, Anaís Garrell, Alberto Sanfeliu","doi":"10.1007/s12369-023-01067-0","DOIUrl":null,"url":null,"abstract":"Abstract Recent research in Human Robot Collaboration (HRC) has spread and specialised in many sub-fields. Many show considerable advances, but the human–robot collaborative navigation (HRCN) field seems to be stuck focusing on implicit collaboration settings, on hypothetical or simulated task allocation problems, on shared autonomy or on having the human as a manager. This work takes a step forward by presenting an end-to-end system capable of handling real-world human–robot collaborative navigation tasks. This system makes use of the Social Reward Sources model (SRS), a knowledge representation to simultaneously tackle task allocation and path planning, proposes a multi-agent Monte Carlo Tree Search (MCTS) planner for human–robot teams, presents the collaborative search as a testbed for HRCN and studies the usage of smartphones for communication in this setting. The detailed experiments prove the viability of the approach, explore collaboration roles adopted by the human–robot team and test the acceptability and utility of different communication interface designs.","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"140 1","pages":"0"},"PeriodicalIF":3.7000,"publicationDate":"2023-10-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s12369-023-01067-0","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
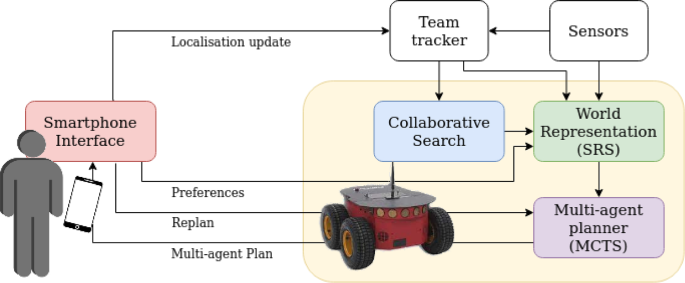
Abstract Recent research in Human Robot Collaboration (HRC) has spread and specialised in many sub-fields. Many show considerable advances, but the human–robot collaborative navigation (HRCN) field seems to be stuck focusing on implicit collaboration settings, on hypothetical or simulated task allocation problems, on shared autonomy or on having the human as a manager. This work takes a step forward by presenting an end-to-end system capable of handling real-world human–robot collaborative navigation tasks. This system makes use of the Social Reward Sources model (SRS), a knowledge representation to simultaneously tackle task allocation and path planning, proposes a multi-agent Monte Carlo Tree Search (MCTS) planner for human–robot teams, presents the collaborative search as a testbed for HRCN and studies the usage of smartphones for communication in this setting. The detailed experiments prove the viability of the approach, explore collaboration roles adopted by the human–robot team and test the acceptability and utility of different communication interface designs.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
