{"title":"PepperOSC: enabling interactive sonification of a robot’s expressive movement","authors":"Adrian B. Latupeirissa, Roberto Bresin","doi":"10.1007/s12193-023-00414-9","DOIUrl":null,"url":null,"abstract":"Abstract This paper presents the design and development of PepperOSC, an interface that connects Pepper and NAO robots with sound production tools to enable the development of interactive sonification in human-robot interaction (HRI). The interface uses Open Sound Control (OSC) messages to stream kinematic data from robots to various sound design and music production tools. The goals of PepperOSC are twofold: (i) to provide a tool for HRI researchers in developing multimodal user interfaces through sonification, and (ii) to lower the barrier for sound designers to contribute to HRI. To demonstrate the potential use of PepperOSC, this paper also presents two applications we have conducted: (i) a course project by two master’s students who created a robot sound model in Pure Data, and (ii) a museum installation of Pepper robot, employing sound models developed by a sound designer and a composer/researcher in music technology using MaxMSP and SuperCollider respectively. Furthermore, we discuss the potential use cases of PepperOSC in social robotics and artistic contexts. These applications demonstrate the versatility of PepperOSC and its ability to explore diverse aesthetic strategies for robot movement sonification, offering a promising approach to enhance the effectiveness and appeal of human-robot interactions.","PeriodicalId":17529,"journal":{"name":"Journal on Multimodal User Interfaces","volume":"149 1","pages":"0"},"PeriodicalIF":2.1000,"publicationDate":"2023-09-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal on Multimodal User Interfaces","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s12193-023-00414-9","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 1
Abstract
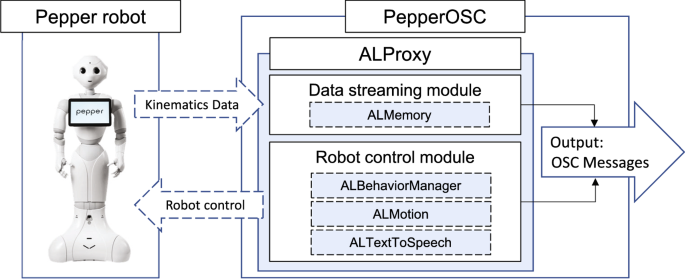
Abstract This paper presents the design and development of PepperOSC, an interface that connects Pepper and NAO robots with sound production tools to enable the development of interactive sonification in human-robot interaction (HRI). The interface uses Open Sound Control (OSC) messages to stream kinematic data from robots to various sound design and music production tools. The goals of PepperOSC are twofold: (i) to provide a tool for HRI researchers in developing multimodal user interfaces through sonification, and (ii) to lower the barrier for sound designers to contribute to HRI. To demonstrate the potential use of PepperOSC, this paper also presents two applications we have conducted: (i) a course project by two master’s students who created a robot sound model in Pure Data, and (ii) a museum installation of Pepper robot, employing sound models developed by a sound designer and a composer/researcher in music technology using MaxMSP and SuperCollider respectively. Furthermore, we discuss the potential use cases of PepperOSC in social robotics and artistic contexts. These applications demonstrate the versatility of PepperOSC and its ability to explore diverse aesthetic strategies for robot movement sonification, offering a promising approach to enhance the effectiveness and appeal of human-robot interactions.
期刊介绍:
The Journal of Multimodal User Interfaces publishes work in the design, implementation and evaluation of multimodal interfaces. Research in the domain of multimodal interaction is by its very essence a multidisciplinary area involving several fields including signal processing, human-machine interaction, computer science, cognitive science and ergonomics. This journal focuses on multimodal interfaces involving advanced modalities, several modalities and their fusion, user-centric design, usability and architectural considerations. Use cases and descriptions of specific application areas are welcome including for example e-learning, assistance, serious games, affective and social computing, interaction with avatars and robots.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
