{"title":"Extrovert or Introvert? GAN-Based Humanoid Upper-Body Gesture Generation for Different Impressions","authors":"Bowen Wu, Chaoran Liu, Carlos Toshinori Ishi, Jiaqi Shi, Hiroshi Ishiguro","doi":"10.1007/s12369-023-01051-8","DOIUrl":null,"url":null,"abstract":"Abstract Gestures, a form of body language, significantly influence how users perceive humanoid robots. Recent data-driven methods for co-speech gestures have successfully enhanced the naturalness of the generated gestures. Moreover, compared to rule-based systems, these methods are more generalizable for unseen speech input. However, many of these methods cannot directly influence people’s perceptions of robots. The primary challenge lies in the intricacy of constructing a dataset with varied impression labels to develop a conditional generation model. In our prior work ([22]) Controlling the impression of robots via gan-based gesture generation. In:Proceedings of the international conference on intelligent robots and systems. IEEE, pp 9288-9295), we introduced a heuristic approach for automatic labeling, training a deep learning model to control robot impressions. We demonstrated the model’s effectiveness on both a virtual agent and a humanoid robot. In this study, we refined the motion retargeting algorithm for the humanoid robot and conducted a user study using four questions representing different aspects of extroversion. Our results show an improved capability in controlling the perceived degree of extroversion in the humanoid robot compared to previous methods. Furthermore, we discovered that different aspects of extroversion interact uniquely with motion statistics","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"152 1","pages":"0"},"PeriodicalIF":3.7000,"publicationDate":"2023-10-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s12369-023-01051-8","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
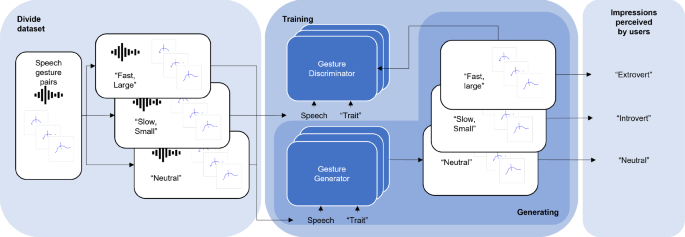
Abstract Gestures, a form of body language, significantly influence how users perceive humanoid robots. Recent data-driven methods for co-speech gestures have successfully enhanced the naturalness of the generated gestures. Moreover, compared to rule-based systems, these methods are more generalizable for unseen speech input. However, many of these methods cannot directly influence people’s perceptions of robots. The primary challenge lies in the intricacy of constructing a dataset with varied impression labels to develop a conditional generation model. In our prior work ([22]) Controlling the impression of robots via gan-based gesture generation. In:Proceedings of the international conference on intelligent robots and systems. IEEE, pp 9288-9295), we introduced a heuristic approach for automatic labeling, training a deep learning model to control robot impressions. We demonstrated the model’s effectiveness on both a virtual agent and a humanoid robot. In this study, we refined the motion retargeting algorithm for the humanoid robot and conducted a user study using four questions representing different aspects of extroversion. Our results show an improved capability in controlling the perceived degree of extroversion in the humanoid robot compared to previous methods. Furthermore, we discovered that different aspects of extroversion interact uniquely with motion statistics
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
