{"title":"Robust high-gain observer-based sliding mode controller for pitch and yaw position control of an AUV","authors":"Ravishankar P. Desai, Narayan S. Manjarekar","doi":"10.1002/adc2.177","DOIUrl":null,"url":null,"abstract":"<p>This article addresses a trajectory tracking control problem concerning an autonomous underwater vehicle's pitch and yaw channel dynamics in the presence of model uncertainties, underwater disturbances, and input saturation. Three different observers are introduced to estimate unknown state variables: a Luenberger-type cubic observer, a sliding mode observer, and a high-gain observer (HGO). Initially, a backstepping controller is employed to tackle the tracking problem, extending it to incorporate backstepping sliding mode control (SMC). The mentioned observers are utilized in both aspects of the controller design. Our proposed control law assesses trajectory tracking performance by introducing virtual control inputs, with the sliding surface designed to guide the current state variables toward approximating the virtual state variables. By combining backstepping and SMC, ensure that the state variables of the closed-loop system converge to the desired state using the HGO. A rigorous analysis is incorporated to validate the robust performance of our proposed control law under conditions of model uncertainties and underwater disturbances. Furthermore, the control law is extended for anti-windup compensation, mitigating adverse effects on stern and rudder plane saturation levels. Lyapunov stability theory is adopted to establish the stability of the closed-loop system. Our simulation results convincingly demonstrate the effectiveness of the HGO-based backstepping SMC law compared to alternative control approaches.</p>","PeriodicalId":100030,"journal":{"name":"Advanced Control for Applications","volume":"6 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2023-12-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adc2.177","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Control for Applications","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adc2.177","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
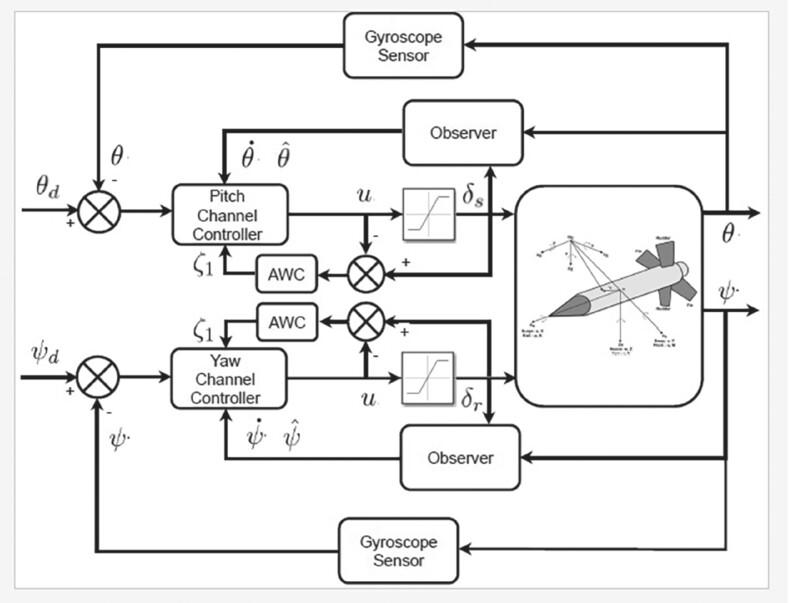
This article addresses a trajectory tracking control problem concerning an autonomous underwater vehicle's pitch and yaw channel dynamics in the presence of model uncertainties, underwater disturbances, and input saturation. Three different observers are introduced to estimate unknown state variables: a Luenberger-type cubic observer, a sliding mode observer, and a high-gain observer (HGO). Initially, a backstepping controller is employed to tackle the tracking problem, extending it to incorporate backstepping sliding mode control (SMC). The mentioned observers are utilized in both aspects of the controller design. Our proposed control law assesses trajectory tracking performance by introducing virtual control inputs, with the sliding surface designed to guide the current state variables toward approximating the virtual state variables. By combining backstepping and SMC, ensure that the state variables of the closed-loop system converge to the desired state using the HGO. A rigorous analysis is incorporated to validate the robust performance of our proposed control law under conditions of model uncertainties and underwater disturbances. Furthermore, the control law is extended for anti-windup compensation, mitigating adverse effects on stern and rudder plane saturation levels. Lyapunov stability theory is adopted to establish the stability of the closed-loop system. Our simulation results convincingly demonstrate the effectiveness of the HGO-based backstepping SMC law compared to alternative control approaches.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
