Carla S. Jakobowsky, Anna M. H. Abrams, Astrid M. Rosenthal-von der Pütten
{"title":"Gaze-Cues of Humans and Robots on Pedestrian Ways","authors":"Carla S. Jakobowsky, Anna M. H. Abrams, Astrid M. Rosenthal-von der Pütten","doi":"10.1007/s12369-023-01064-3","DOIUrl":null,"url":null,"abstract":"<p>Delivery robots and personal cargo robots are increasingly sharing space with incidentally co-present persons (InCoPs) on pedestrian ways facing the challenge of socially adequate and safe navigation. Humans are able to effortlessly negotiate this shared space by signalling their skirting intentions via non-verbal gaze cues. In two online-experiments we investigated whether this phenomenon of gaze cuing can be transferred to human–robot interaction. In the first study, participants (<i>n</i> = 92) watched short videos in which either a human, a humanoid robot or a non-humanoid delivery robot moved towards the camera. In each video, the counterpart looked either straight towards the camera or did an eye movement to the right or left. The results showed that when the counterpart gaze cued to their left, also participants skirted more often to the left from their perspective, thereby walking past each other and avoiding collision. Since the participants were recruited in a right-hand driving country we replicated the study in left-hand driving countries (<i>n</i> = 176). Results showed that participants skirted more often to the right when the counterpart gaze cued to the right, and to the left in case of eye movements to the left, expanding our previous result. In both studies, skirting behavior did not differ regarding the type of counterpart. Hence, gaze cues increase the chance to trigger complementary skirting behavior in InCoPs independently of the robot morphology. Equipping robots with eyes can help to indicate moving direction by gaze cues and thereby improve interactions between humans and robots on pedestrian ways.</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"20 1","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2023-12-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-023-01064-3","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
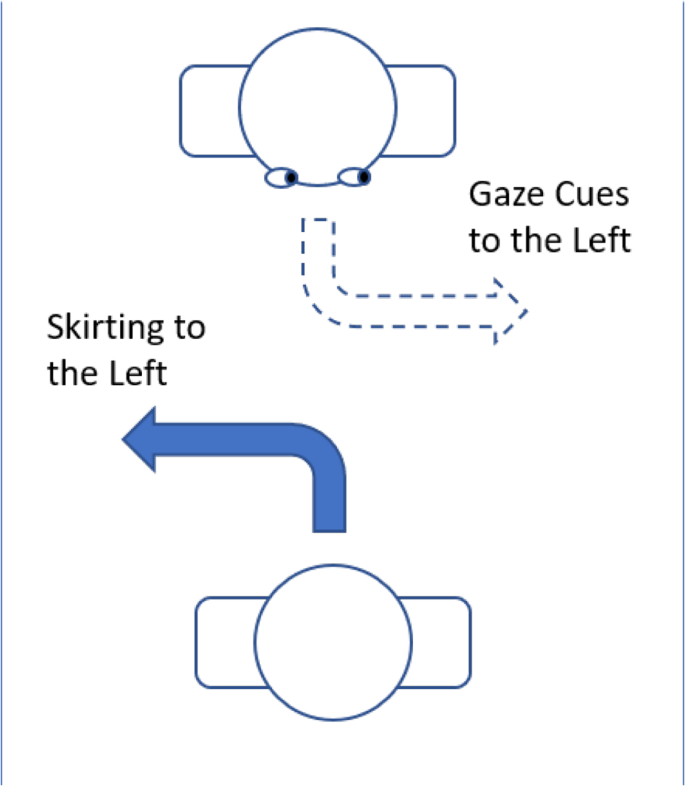
Delivery robots and personal cargo robots are increasingly sharing space with incidentally co-present persons (InCoPs) on pedestrian ways facing the challenge of socially adequate and safe navigation. Humans are able to effortlessly negotiate this shared space by signalling their skirting intentions via non-verbal gaze cues. In two online-experiments we investigated whether this phenomenon of gaze cuing can be transferred to human–robot interaction. In the first study, participants (n = 92) watched short videos in which either a human, a humanoid robot or a non-humanoid delivery robot moved towards the camera. In each video, the counterpart looked either straight towards the camera or did an eye movement to the right or left. The results showed that when the counterpart gaze cued to their left, also participants skirted more often to the left from their perspective, thereby walking past each other and avoiding collision. Since the participants were recruited in a right-hand driving country we replicated the study in left-hand driving countries (n = 176). Results showed that participants skirted more often to the right when the counterpart gaze cued to the right, and to the left in case of eye movements to the left, expanding our previous result. In both studies, skirting behavior did not differ regarding the type of counterpart. Hence, gaze cues increase the chance to trigger complementary skirting behavior in InCoPs independently of the robot morphology. Equipping robots with eyes can help to indicate moving direction by gaze cues and thereby improve interactions between humans and robots on pedestrian ways.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
