{"title":"Robot-Locust Social Information Transfer Occurs in Predator Avoidance Contexts","authors":"Donato Romano, Cesare Stefanini","doi":"10.1007/s12369-024-01100-w","DOIUrl":null,"url":null,"abstract":"<p>Social learning is an evolutionarily important ability increasingly attributed also to invertebrate species. Interfacing robots with animals represents a promising strategy to investigate social learning. Herein, we studied if the gregarious form of <i>Locusta migratoria</i>, a particularly suited model to examine social learning, can use social information provided by robotic demonstrators to optimize their predator avoidance. Robotic demonstrators with different silhouettes and colours (biomimetic or neutral) were used to investigate if their rotation on a rod (e.g. hiding behaviour) elicited the same behaviour in neighbouring locusts. Locusts’ responses were affected by different robotic demonstrators, observing a significant impact of the biomimetic silhouette in reducing the latency duration, and in promoting social learning (e.g. locusts displaying hiding behaviour after observing it in robotic demonstrators). A significant impact of colour patterns in triggering socially induced hiding behaviour was also recorded, especially when the biomimetic silhouette was coloured with the gregarious-like pattern. This research indicates gregarious locusts exploit social information in specific ecological contexts, providing basic knowledge on the complex behavioural ecology and social biology in invertebrates. The proposed animal-robot interaction paradigm shows the role of robots as carrier of social information to living organisms, suggesting social biorobotics as advanced and sustainable approach for socio-biology investigation, and environmental management.</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"4 1","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2024-01-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-024-01100-w","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
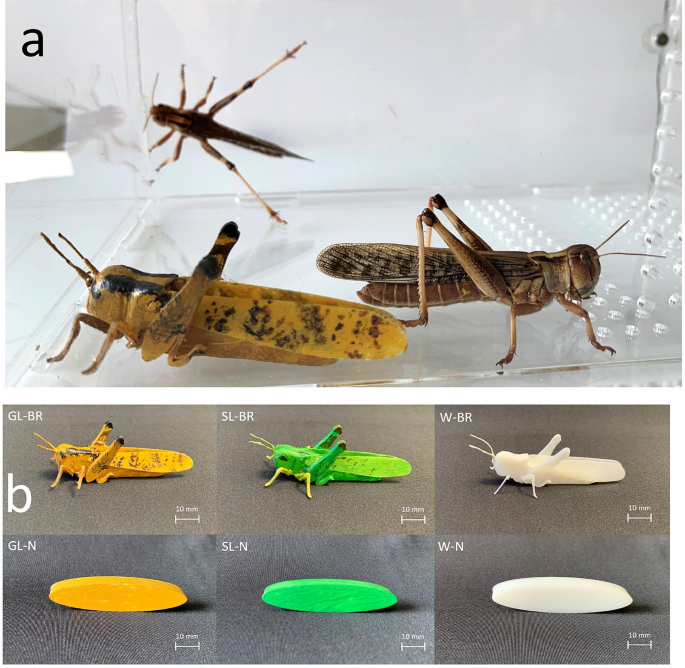
Social learning is an evolutionarily important ability increasingly attributed also to invertebrate species. Interfacing robots with animals represents a promising strategy to investigate social learning. Herein, we studied if the gregarious form of Locusta migratoria, a particularly suited model to examine social learning, can use social information provided by robotic demonstrators to optimize their predator avoidance. Robotic demonstrators with different silhouettes and colours (biomimetic or neutral) were used to investigate if their rotation on a rod (e.g. hiding behaviour) elicited the same behaviour in neighbouring locusts. Locusts’ responses were affected by different robotic demonstrators, observing a significant impact of the biomimetic silhouette in reducing the latency duration, and in promoting social learning (e.g. locusts displaying hiding behaviour after observing it in robotic demonstrators). A significant impact of colour patterns in triggering socially induced hiding behaviour was also recorded, especially when the biomimetic silhouette was coloured with the gregarious-like pattern. This research indicates gregarious locusts exploit social information in specific ecological contexts, providing basic knowledge on the complex behavioural ecology and social biology in invertebrates. The proposed animal-robot interaction paradigm shows the role of robots as carrier of social information to living organisms, suggesting social biorobotics as advanced and sustainable approach for socio-biology investigation, and environmental management.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
