{"title":"Robust active suspension control of vehicles with varying vehicle mass","authors":"Masahiro Oya, Hiraku Komura","doi":"10.1007/s10015-023-00931-6","DOIUrl":null,"url":null,"abstract":"<div><p>In vehicles with active suspensions, if handling stability is improved strongly by using a LQ controller for a road surface such as large bumps, ride comfort may deteriorate even for a road surface such as not so large bumps. Recently, to avoid the problem, a nonlinear active suspension control scheme has been proposed. However, in the proposed nonlinear controller, it is required that vehicle mass does not vary. In practice, vehicle mass varies greatly. If vehicle mass varies, the controller has to be redesigned. In this paper, to address the problem, based on the proposed nonlinear control scheme, we develop a new robust active suspension control scheme.</p></div>","PeriodicalId":46050,"journal":{"name":"Artificial Life and Robotics","volume":"29 2","pages":"326 - 333"},"PeriodicalIF":0.8000,"publicationDate":"2024-01-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Life and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s10015-023-00931-6","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
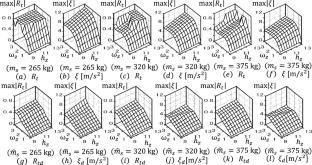
In vehicles with active suspensions, if handling stability is improved strongly by using a LQ controller for a road surface such as large bumps, ride comfort may deteriorate even for a road surface such as not so large bumps. Recently, to avoid the problem, a nonlinear active suspension control scheme has been proposed. However, in the proposed nonlinear controller, it is required that vehicle mass does not vary. In practice, vehicle mass varies greatly. If vehicle mass varies, the controller has to be redesigned. In this paper, to address the problem, based on the proposed nonlinear control scheme, we develop a new robust active suspension control scheme.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
