An unmanned aerial vehicle light detection and ranging Simultaneous Localisation And Mapping algorithm based on factor graph optimisation for tunnel 3D mapping
{"title":"An unmanned aerial vehicle light detection and ranging Simultaneous Localisation And Mapping algorithm based on factor graph optimisation for tunnel 3D mapping","authors":"Jian Xie, Zhuoping Wu, Bing Wang, Aoshu Xu, Yunfei Chen, Jing Li","doi":"10.1049/rsn2.12541","DOIUrl":null,"url":null,"abstract":"<p>The current mature Simultaneous Localisation And Mapping (SLAM) algorithms, when applied to tunnel scenarios with point cloud degradation and poor lighting conditions, often lead to a sharp increase in the estimated attitude error of the unmanned aerial vehicle (UAV), or even prevent the UAV from moving autonomously due to severe feature degradation. To address the above problems, the authors propose a SLAM algorithm based on factor graph optimisation, Iterative Closest Point and Normal Distributions Transform algorithms. A front-end point cloud registration module and a back-end construction algorithm based on filtering and graph optimisation are designed. To verify the effectiveness of the proposed algorithm, experiments are conducted on KITTI dataset and real tunnel scenes, and compared with LiDAR Odometry and Mapping (LOAM) and lightweight and ground optimised (LeGO)-LOAM algorithms. The results show that the average processing time of the proposed method is about 75 ms, which can meet the real-time requirements of autonomous aerial vehicles. Compared with LOAM and LeGO-LOAM in the real tunnel experiment, the proposed method shows the tunnel 3D map construction.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 6","pages":"939-952"},"PeriodicalIF":1.5000,"publicationDate":"2024-01-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12541","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12541","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
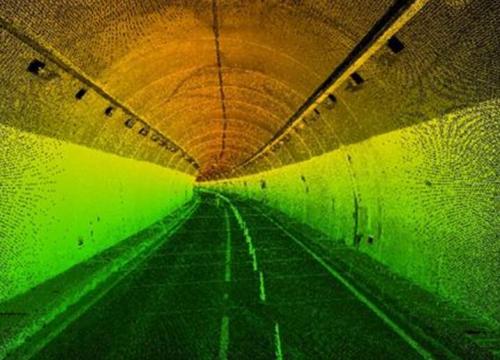
The current mature Simultaneous Localisation And Mapping (SLAM) algorithms, when applied to tunnel scenarios with point cloud degradation and poor lighting conditions, often lead to a sharp increase in the estimated attitude error of the unmanned aerial vehicle (UAV), or even prevent the UAV from moving autonomously due to severe feature degradation. To address the above problems, the authors propose a SLAM algorithm based on factor graph optimisation, Iterative Closest Point and Normal Distributions Transform algorithms. A front-end point cloud registration module and a back-end construction algorithm based on filtering and graph optimisation are designed. To verify the effectiveness of the proposed algorithm, experiments are conducted on KITTI dataset and real tunnel scenes, and compared with LiDAR Odometry and Mapping (LOAM) and lightweight and ground optimised (LeGO)-LOAM algorithms. The results show that the average processing time of the proposed method is about 75 ms, which can meet the real-time requirements of autonomous aerial vehicles. Compared with LOAM and LeGO-LOAM in the real tunnel experiment, the proposed method shows the tunnel 3D map construction.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.






 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
