Marco Milone, Pietro Anoldo, Michele Manigrasso, Grazia Cantore, Silvia Campanile, Gianluca Rompianesi, Roberto Ivan Troisi, Anna D’Amore, Giovanni Domenico De Palma
{"title":"Robotic 8-mm trocar fascial wounds: To close or not to close?","authors":"Marco Milone, Pietro Anoldo, Michele Manigrasso, Grazia Cantore, Silvia Campanile, Gianluca Rompianesi, Roberto Ivan Troisi, Anna D’Amore, Giovanni Domenico De Palma","doi":"10.1002/rcs.2624","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>The aim of this study was to investigate 8-mm robotic trocar site hernia (TSH) rate over the short and long term, providing aids to manage the related fascial wounds.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>A retrospective analysis of 320 patients undergoing robotic surgery was conducted. The primary outcome was 8-mm TSH rate with a minimum follow-up of 12 months. The secondary outcome was the rate of haematomas and infections related to 8-mm wounds and their association with patient comorbidities and trocar position.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>One case of TSH was observed (0.31%). There were 15 cases of wound infection (4.68%) and 22 cases of wound haematoma (6.87%). Trocar related complications were significantly associated with patient comorbidities, not with trocar position.</p>\n </section>\n \n <section>\n \n <h3> Conclusions</h3>\n \n <p>Our results do not justify the 8-mm fascial wound closure. Data concerning the association between trocar-related complications and patient comorbidities strengthen the need to implement the control of metabolic state and correct administration of perioperative therapy in high-risk patients.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 2","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2024-03-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2624","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2624","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background
The aim of this study was to investigate 8-mm robotic trocar site hernia (TSH) rate over the short and long term, providing aids to manage the related fascial wounds.
Methods
A retrospective analysis of 320 patients undergoing robotic surgery was conducted. The primary outcome was 8-mm TSH rate with a minimum follow-up of 12 months. The secondary outcome was the rate of haematomas and infections related to 8-mm wounds and their association with patient comorbidities and trocar position.
Results
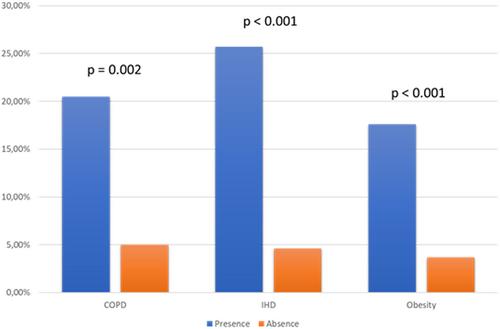
One case of TSH was observed (0.31%). There were 15 cases of wound infection (4.68%) and 22 cases of wound haematoma (6.87%). Trocar related complications were significantly associated with patient comorbidities, not with trocar position.
Conclusions
Our results do not justify the 8-mm fascial wound closure. Data concerning the association between trocar-related complications and patient comorbidities strengthen the need to implement the control of metabolic state and correct administration of perioperative therapy in high-risk patients.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
