Lennart Lorenz Freimuth Jahn , Seongjeong Park , Yongseob Lim , Jinung An , Gyeungho Choi
{"title":"Enhancing lane detection with a lightweight collaborative late fusion model","authors":"Lennart Lorenz Freimuth Jahn , Seongjeong Park , Yongseob Lim , Jinung An , Gyeungho Choi","doi":"10.1016/j.robot.2024.104680","DOIUrl":null,"url":null,"abstract":"<div><p>Research in autonomous systems is gaining popularity both in academia and industry. These systems offer comfort, new business opportunities such as self-driving taxis, more efficient resource utilization through car-sharing, and most importantly, enhanced road safety. Different forms of Vehicle-to-Everything (V2X) communication have been under development for many years to enhance safety. Advances in wireless technologies have enabled more data transmission with lower latency, creating more possibilities for safer driving. Collaborative perception is a critical technique to address occlusion and sensor failure issues in autonomous driving. To enhance safety and efficiency, recent works have focused on sharing extracted features instead of raw data or final outputs, leading to reduced message sizes compared to raw sensor data. Reducing message size is important to enable collaborative perception to coexist with other V2X applications on bandwidth-limited communication devices.</p><p>To address this issue and significantly reduce the size of messages sent while maintaining high accuracy, we propose our model: LaCPF (<strong>La</strong>te <strong>C</strong>ollaborative <strong>P</strong>erception <strong>F</strong>usion), which uses deep learning for late fusion. We demonstrate that we can achieve better results while using only half the message size over other methods. Our late fusion framework is also independent of the local perception model, which is essential, as not all vehicles on the road will employ the same methods. Therefore LaCPF can be scaled more quickly as it is model and sensor-agnostic.</p></div>","PeriodicalId":49592,"journal":{"name":"Robotics and Autonomous Systems","volume":"175 ","pages":"Article 104680"},"PeriodicalIF":5.2000,"publicationDate":"2024-05-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0921889024000630/pdfft?md5=4b34c6d1c46cbc9a3e260a3f133a7a4a&pid=1-s2.0-S0921889024000630-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Autonomous Systems","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0921889024000630","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/3/5 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
Research in autonomous systems is gaining popularity both in academia and industry. These systems offer comfort, new business opportunities such as self-driving taxis, more efficient resource utilization through car-sharing, and most importantly, enhanced road safety. Different forms of Vehicle-to-Everything (V2X) communication have been under development for many years to enhance safety. Advances in wireless technologies have enabled more data transmission with lower latency, creating more possibilities for safer driving. Collaborative perception is a critical technique to address occlusion and sensor failure issues in autonomous driving. To enhance safety and efficiency, recent works have focused on sharing extracted features instead of raw data or final outputs, leading to reduced message sizes compared to raw sensor data. Reducing message size is important to enable collaborative perception to coexist with other V2X applications on bandwidth-limited communication devices.
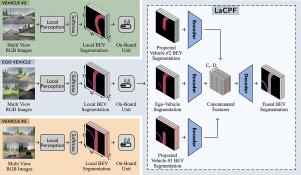
To address this issue and significantly reduce the size of messages sent while maintaining high accuracy, we propose our model: LaCPF (Late Collaborative Perception Fusion), which uses deep learning for late fusion. We demonstrate that we can achieve better results while using only half the message size over other methods. Our late fusion framework is also independent of the local perception model, which is essential, as not all vehicles on the road will employ the same methods. Therefore LaCPF can be scaled more quickly as it is model and sensor-agnostic.
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
