{"title":"Online simultaneous localization and mapping with parallelization for dynamic line segments based on moving horizon estimation","authors":"Haziq Muhammad, Yasumasa Ishikawa, Kazuma Sekiguchi, Kenichiro Nonaka","doi":"10.1007/s10015-024-00937-8","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, to render SLAM robust in dynamic environments, we propose a novel LiDAR SLAM algorithm that estimates the velocity of all objects in the scene while suppressing speed of static objects by moving horizon estimation (MHE). We approximate environment features as dynamic line segments having velocity. To deal with static objects as well, MHE is employed, so that its objective function allows the addition of velocity suppression terms that treat stationary objects. By considering association probability, the SLAM algorithm can track the endpoints of line segments to estimate the velocity along the line segments. Even if it is temporarily occluded, the estimation is accurate, because MHE considers a finite length of past measurements. Parallelization of the robot’s localization with the map’s estimation and careful mathematical elimination of decision variables allows online implementations. Post-process modifications remove possible spurious estimates by considering the piercing of LiDAR lasers and integrating maps. Simulation and experiment results of the proposed method prove that the presented algorithm can robustly perform online SLAM even with moving objects present.</p></div>","PeriodicalId":46050,"journal":{"name":"Artificial Life and Robotics","volume":"29 2","pages":"311 - 325"},"PeriodicalIF":0.8000,"publicationDate":"2024-03-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Life and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s10015-024-00937-8","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
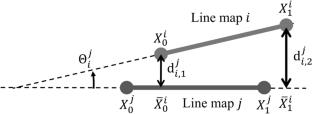
In this paper, to render SLAM robust in dynamic environments, we propose a novel LiDAR SLAM algorithm that estimates the velocity of all objects in the scene while suppressing speed of static objects by moving horizon estimation (MHE). We approximate environment features as dynamic line segments having velocity. To deal with static objects as well, MHE is employed, so that its objective function allows the addition of velocity suppression terms that treat stationary objects. By considering association probability, the SLAM algorithm can track the endpoints of line segments to estimate the velocity along the line segments. Even if it is temporarily occluded, the estimation is accurate, because MHE considers a finite length of past measurements. Parallelization of the robot’s localization with the map’s estimation and careful mathematical elimination of decision variables allows online implementations. Post-process modifications remove possible spurious estimates by considering the piercing of LiDAR lasers and integrating maps. Simulation and experiment results of the proposed method prove that the presented algorithm can robustly perform online SLAM even with moving objects present.
本文提出了一种新型激光雷达 SLAM 算法,通过移动地平线估计(MHE)来估计场景中所有物体的速度,同时抑制静态物体的速度,从而使 SLAM 在动态环境中具有鲁棒性。我们将环境特征近似为具有速度的动态线段。为了同时处理静态物体,我们采用了 MHE,因此其目标函数允许添加速度抑制项来处理静态物体。通过考虑关联概率,SLAM 算法可以跟踪线段的端点,从而估算出线段的速度。即使暂时被遮挡,估算结果也是准确的,因为 MHE 考虑了过去测量的有限长度。机器人定位与地图估算的并行化,以及对决策变量的仔细数学消除,使得在线执行成为可能。后处理修改通过考虑激光雷达激光穿透和积分地图来消除可能的虚假估计。所提方法的仿真和实验结果证明,即使存在移动物体,所提出的算法也能稳健地执行在线 SLAM。


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
