Marcos Maroto-Gómez, María Malfaz, José Carlos Castillo, Álvaro Castro-González, Miguel Ángel Salichs
{"title":"Personalizing Activity Selection in Assistive Social Robots from Explicit and Implicit User Feedback","authors":"Marcos Maroto-Gómez, María Malfaz, José Carlos Castillo, Álvaro Castro-González, Miguel Ángel Salichs","doi":"10.1007/s12369-024-01124-2","DOIUrl":null,"url":null,"abstract":"<p>Robots in multi-user environments require adaptation to produce personalized interactions. In these scenarios, the user’s feedback leads the robots to learn from experiences and use this knowledge to generate adapted activities to the user’s preferences. However, preferences are user-specific and may suffer variations, so learning is required to personalize the robot’s actions to each user. Robots can obtain feedback in Human–Robot Interaction by asking users their opinion about the activity (explicit feedback) or estimating it from the interaction (implicit feedback). This paper presents a Reinforcement Learning framework for social robots to personalize activity selection using the preferences and feedback obtained from the users. This paper also studies the role of user feedback in learning, and it asks whether combining explicit and implicit user feedback produces better robot adaptive behavior than considering them separately. We evaluated the system with 24 participants in a long-term experiment where they were divided into three conditions: (i) adapting the activity selection using the explicit feedback that was obtained from asking the user how much they liked the activities; (ii) using the implicit feedback obtained from interaction metrics of each activity generated from the user’s actions; and (iii) combining explicit and implicit feedback. As we hypothesized, the results show that combining both feedback produces better adaptive values when correlating initial and final activity scores, overcoming the use of individual explicit and implicit feedback. We also found that the kind of user feedback does not affect the user’s engagement or the number of activities carried out during the experiment.</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"37 1","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2024-04-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-024-01124-2","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
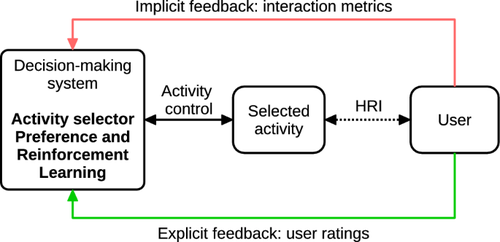
Robots in multi-user environments require adaptation to produce personalized interactions. In these scenarios, the user’s feedback leads the robots to learn from experiences and use this knowledge to generate adapted activities to the user’s preferences. However, preferences are user-specific and may suffer variations, so learning is required to personalize the robot’s actions to each user. Robots can obtain feedback in Human–Robot Interaction by asking users their opinion about the activity (explicit feedback) or estimating it from the interaction (implicit feedback). This paper presents a Reinforcement Learning framework for social robots to personalize activity selection using the preferences and feedback obtained from the users. This paper also studies the role of user feedback in learning, and it asks whether combining explicit and implicit user feedback produces better robot adaptive behavior than considering them separately. We evaluated the system with 24 participants in a long-term experiment where they were divided into three conditions: (i) adapting the activity selection using the explicit feedback that was obtained from asking the user how much they liked the activities; (ii) using the implicit feedback obtained from interaction metrics of each activity generated from the user’s actions; and (iii) combining explicit and implicit feedback. As we hypothesized, the results show that combining both feedback produces better adaptive values when correlating initial and final activity scores, overcoming the use of individual explicit and implicit feedback. We also found that the kind of user feedback does not affect the user’s engagement or the number of activities carried out during the experiment.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
