Forward dynamics simulation of a simplified neuromuscular-skeletal-exoskeletal model based on the CMA-ES optimization algorithm: framework and case studies
{"title":"Forward dynamics simulation of a simplified neuromuscular-skeletal-exoskeletal model based on the CMA-ES optimization algorithm: framework and case studies","authors":"Wei Jin, Jiaqi Liu, Qiwei Zhang, Xiaoxu Zhang, Qining Wang, Jian Xu, Hongbin Fang","doi":"10.1007/s11044-024-09982-4","DOIUrl":null,"url":null,"abstract":"<p>The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. This study incorporates the integration of exoskeleton models into a reflex-based gait model, emphasizing human-exoskeleton interaction. Specifically, we introduce an optimization-based dynamic simulation framework that integrates a neuromusculoskeletal feedback loop, multibody dynamics, human-exoskeleton interaction, and foot-ground contact. The framework advances in human-exoskeleton interaction and muscle reflex model refinement. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To evaluate the validity of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals with respect to varying walking conditions, with the Pearson correlation coefficient R > 0.7. Simulations of the human walking with the exoskeleton in both passive mode and assisting mode at a peak torque of 20 N⋅m are further conducted to investigate the effect of exoskeleton assistance on human biomechanics. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.</p>","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"40 1","pages":""},"PeriodicalIF":3.3000,"publicationDate":"2024-04-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11044-024-09982-4","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
引用次数: 0
Abstract
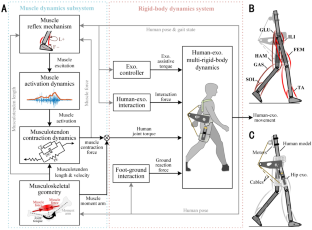
The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. This study incorporates the integration of exoskeleton models into a reflex-based gait model, emphasizing human-exoskeleton interaction. Specifically, we introduce an optimization-based dynamic simulation framework that integrates a neuromusculoskeletal feedback loop, multibody dynamics, human-exoskeleton interaction, and foot-ground contact. The framework advances in human-exoskeleton interaction and muscle reflex model refinement. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To evaluate the validity of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals with respect to varying walking conditions, with the Pearson correlation coefficient R > 0.7. Simulations of the human walking with the exoskeleton in both passive mode and assisting mode at a peak torque of 20 N⋅m are further conducted to investigate the effect of exoskeleton assistance on human biomechanics. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
