Menghan Xi, Lin Wu, Qianqian Li, Guocheng Mao, Pengfei Wu, Bing Ji, Lifeng Bao, Yong Wang
{"title":"Matching area selection for arctic gravity matching navigation based on adaptive all-field extended extremum algorithm","authors":"Menghan Xi, Lin Wu, Qianqian Li, Guocheng Mao, Pengfei Wu, Bing Ji, Lifeng Bao, Yong Wang","doi":"10.1049/rsn2.12571","DOIUrl":null,"url":null,"abstract":"<p>Suitable and effective matching area selection is crucial for gravity matching-aided navigation. In this paper, an all-field extended extremum algorithm based on an adaptive threshold (AT-AEE) is proposed for matching area selection in the Arctic Sea. The gradient data is obtained by using the convolution of gravity reference graph data and all-field extended extremum parameters. Then, the adaptive threshold method was employed to determine the optimal gradient threshold based on gravity anomaly data across various test areas. Data points with gradients exceeding the specified threshold are identified as local candidate points for matching areas. The test areas containing a certain proportion of local candidate points are designated as the suitable matching areas. Nine test areas in the Arctic Sea with different gravity change characteristics were chosen for simulation experiments to verify the performance of the proposed algorithm. Simulation experiments showed that superior navigation positioning results could be obtained in the matching areas selected by the AT-AEE algorithm. Compared to traditional algorithm, the matching areas derived from the AT-AEE algorithm performed with a better consistency in the gravity matching navigation results. In suitable matching areas with the proportion of local candidate points reaching 70%, the average positioning errors could be reduced to less than 1.5 n miles.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 8","pages":"1307-1317"},"PeriodicalIF":1.5000,"publicationDate":"2024-04-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12571","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12571","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
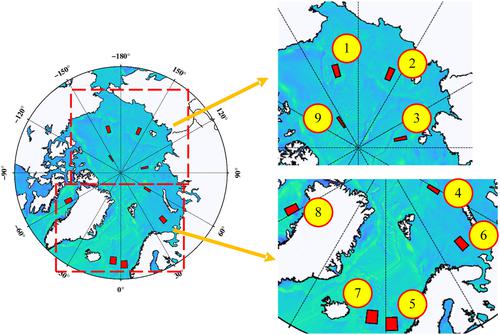
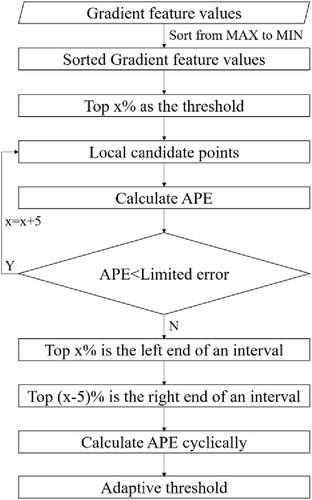
Suitable and effective matching area selection is crucial for gravity matching-aided navigation. In this paper, an all-field extended extremum algorithm based on an adaptive threshold (AT-AEE) is proposed for matching area selection in the Arctic Sea. The gradient data is obtained by using the convolution of gravity reference graph data and all-field extended extremum parameters. Then, the adaptive threshold method was employed to determine the optimal gradient threshold based on gravity anomaly data across various test areas. Data points with gradients exceeding the specified threshold are identified as local candidate points for matching areas. The test areas containing a certain proportion of local candidate points are designated as the suitable matching areas. Nine test areas in the Arctic Sea with different gravity change characteristics were chosen for simulation experiments to verify the performance of the proposed algorithm. Simulation experiments showed that superior navigation positioning results could be obtained in the matching areas selected by the AT-AEE algorithm. Compared to traditional algorithm, the matching areas derived from the AT-AEE algorithm performed with a better consistency in the gravity matching navigation results. In suitable matching areas with the proportion of local candidate points reaching 70%, the average positioning errors could be reduced to less than 1.5 n miles.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
