The development of tissue handling skills is sufficient and comparable after training in virtual reality or on a surgical robotic system: a prospective randomized trial
Felix von Bechtolsheim, Andreas Franz, Sofia Schmidt, Alfred Schneider, Felicitas La Rosée, Olga Radulova-Mauersberger, Grit Krause-Jüttler, Anja Hümpel, Sebastian Bodenstedt, Stefanie Speidel, Jürgen Weitz, Marius Distler, Florian Oehme
{"title":"The development of tissue handling skills is sufficient and comparable after training in virtual reality or on a surgical robotic system: a prospective randomized trial","authors":"Felix von Bechtolsheim, Andreas Franz, Sofia Schmidt, Alfred Schneider, Felicitas La Rosée, Olga Radulova-Mauersberger, Grit Krause-Jüttler, Anja Hümpel, Sebastian Bodenstedt, Stefanie Speidel, Jürgen Weitz, Marius Distler, Florian Oehme","doi":"10.1007/s00464-024-10842-7","DOIUrl":null,"url":null,"abstract":"<h3 data-test=\"abstract-sub-heading\">Background</h3><p>Virtual reality is a frequently chosen method for learning the basics of robotic surgery. However, it is unclear whether tissue handling is adequately trained in VR training compared to training on a real robotic system.</p><h3 data-test=\"abstract-sub-heading\">Methods</h3><p>In this randomized controlled trial, participants were split into two groups for “Fundamentals of Robotic Surgery (FRS)” training on either a DaVinci VR simulator (VR group) or a DaVinci robotic system (Robot group). All participants completed four tasks on the DaVinci robotic system before training (Baseline test), after proficiency in three FRS tasks (Midterm test), and after proficiency in all FRS tasks (Final test). Primary endpoints were forces applied across tests.</p><h3 data-test=\"abstract-sub-heading\">Results</h3><p>This trial included 87 robotic novices, of which 43 and 44 participants received FRS training in VR group and Robot group, respectively. The Baseline test showed no significant differences in force application between the groups indicating a sufficient randomization. In the Midterm and Final test, the force application was not different between groups. Both groups displayed sufficient learning curves with significant improvement of force application. However, the Robot group needed significantly less repetitions in the three FRS tasks Ring tower (Robot: 2.48 vs. VR: 5.45; <i>p</i> < 0.001), Knot Tying (Robot: 5.34 vs. VR: 8.13; <i>p</i> = 0.006), and Vessel Energy Dissection (Robot: 2 vs. VR: 2.38; <i>p</i> = 0.001) until reaching proficiency.</p><h3 data-test=\"abstract-sub-heading\">Conclusion</h3><p>Robotic tissue handling skills improve significantly and comparably after both VR training and training on a real robotic system, but training on a VR simulator might be less efficient.</p>","PeriodicalId":501625,"journal":{"name":"Surgical Endoscopy","volume":"85 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-04-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Surgical Endoscopy","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s00464-024-10842-7","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
Background
Virtual reality is a frequently chosen method for learning the basics of robotic surgery. However, it is unclear whether tissue handling is adequately trained in VR training compared to training on a real robotic system.
Methods
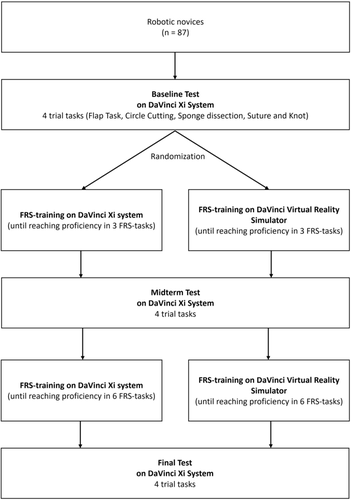
In this randomized controlled trial, participants were split into two groups for “Fundamentals of Robotic Surgery (FRS)” training on either a DaVinci VR simulator (VR group) or a DaVinci robotic system (Robot group). All participants completed four tasks on the DaVinci robotic system before training (Baseline test), after proficiency in three FRS tasks (Midterm test), and after proficiency in all FRS tasks (Final test). Primary endpoints were forces applied across tests.
Results
This trial included 87 robotic novices, of which 43 and 44 participants received FRS training in VR group and Robot group, respectively. The Baseline test showed no significant differences in force application between the groups indicating a sufficient randomization. In the Midterm and Final test, the force application was not different between groups. Both groups displayed sufficient learning curves with significant improvement of force application. However, the Robot group needed significantly less repetitions in the three FRS tasks Ring tower (Robot: 2.48 vs. VR: 5.45; p < 0.001), Knot Tying (Robot: 5.34 vs. VR: 8.13; p = 0.006), and Vessel Energy Dissection (Robot: 2 vs. VR: 2.38; p = 0.001) until reaching proficiency.
Conclusion
Robotic tissue handling skills improve significantly and comparably after both VR training and training on a real robotic system, but training on a VR simulator might be less efficient.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
