Anjelica Alfonso, Kimberly N. McFarland, Kush Savsani, Seung Lee, Daisuke Imai, Aamir Khan, Amit Sharma, Muhammad Saeed, Vinay Kumaran, Adrian Cotterell, David Bruno, Marlon Levy
{"title":"Robotic management of primary cholecystoduodenal fistula: A case report and brief literature review","authors":"Anjelica Alfonso, Kimberly N. McFarland, Kush Savsani, Seung Lee, Daisuke Imai, Aamir Khan, Amit Sharma, Muhammad Saeed, Vinay Kumaran, Adrian Cotterell, David Bruno, Marlon Levy","doi":"10.1002/rcs.2629","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Cholecystoduodenal fistula (CDF) arises from persistent biliary tree disorders, causing fusion between the gallbladder and duodenum. Initially, open resection was common until laparoscopic fistula closure gained popularity. However, complexities within the gallbladder fossa yielded inconsistent outcomes. Advanced imaging and robotic surgery now enhance precision and detection.</p>\n </section>\n \n <section>\n \n <h3> Method</h3>\n \n <p>A 62-year-old woman with chronic cholangitis attributed to cholecystoduodenal fistula underwent successful robotic cholecystectomy and fistula closure.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>Postoperatively, the symptoms subsided with no complications during the robotic procedure. Existing studies report favourable outcomes for robotic cholecystectomy and fistula closure.</p>\n </section>\n \n <section>\n \n <h3> Conclusions</h3>\n \n <p>Our case report showcases a rare instance of successful robotic cholecystectomy with CDF closure. This case, along with a review of previous cases, suggests the potential of robotic surgery as the preferred approach, especially for patients anticipated to face significant laparoscopic morbidity.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 2","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2024-04-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2629","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2629","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background
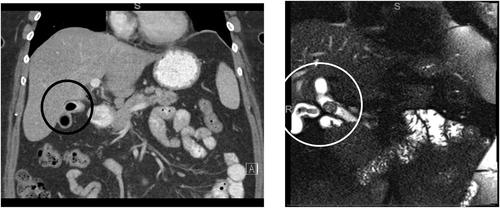
Cholecystoduodenal fistula (CDF) arises from persistent biliary tree disorders, causing fusion between the gallbladder and duodenum. Initially, open resection was common until laparoscopic fistula closure gained popularity. However, complexities within the gallbladder fossa yielded inconsistent outcomes. Advanced imaging and robotic surgery now enhance precision and detection.
Method
A 62-year-old woman with chronic cholangitis attributed to cholecystoduodenal fistula underwent successful robotic cholecystectomy and fistula closure.
Results
Postoperatively, the symptoms subsided with no complications during the robotic procedure. Existing studies report favourable outcomes for robotic cholecystectomy and fistula closure.
Conclusions
Our case report showcases a rare instance of successful robotic cholecystectomy with CDF closure. This case, along with a review of previous cases, suggests the potential of robotic surgery as the preferred approach, especially for patients anticipated to face significant laparoscopic morbidity.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
