Ayse Feyza Yilmaz, Kadir Ozlem, Mehmet Fatih Celebi, Bahman Taherkhani, Fatma Kalaoglu, Aslı Tunçay Atalay, Gokhan Ince, Ozgur Atalay
{"title":"Design and Scalable Fast Fabrication of Biaxial Fabric Pouch Motors for Soft Robotic Artificial Muscle Applications","authors":"Ayse Feyza Yilmaz, Kadir Ozlem, Mehmet Fatih Celebi, Bahman Taherkhani, Fatma Kalaoglu, Aslı Tunçay Atalay, Gokhan Ince, Ozgur Atalay","doi":"10.1002/aisy.202300888","DOIUrl":null,"url":null,"abstract":"<p>Soft pouch motors, engineered to mimic the natural movements of skeletal muscles, play a crucial role in advancing robotics and exoskeleton development. However, the fabrication techniques often involve multistage processes; they lack soft sensing capabilities and are sensitive to cutting and damage. This work introduces a new textile-based pouch motors with the capacity for biaxial actuation and capacitive sensory functions, achieved through the application of computerized knitting technology using ultrahigh molecular weight polyethylene yarn (Spectra) and conductive silver yarns. This method enables the rapid and scalable mass fabrication of robust pouch motors. The resulting pouch motors exhibit maximum lifting capacity of 10 kg, maximum contraction of 53.3% along the <i>y</i>-axis, and transverse extension of 41.18% along the <i>x</i>-axis at 50 kPa pressure. Finite element analysis closely matches the experimental data. The capacitance signals in relation to contraction motion are well suited for detecting air pressure levels and hold promise for applications requiring robotic control. Notably, it effectively elevates an ankle joint simulator at a 20° angle, highlighting its potential for applications such assisting individuals with foot drop. This study presents a practical demonstration of the soft ankle exosuit designed to provide lifting support for individuals facing this mobility challenge.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 8","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2024-06-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202300888","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202300888","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
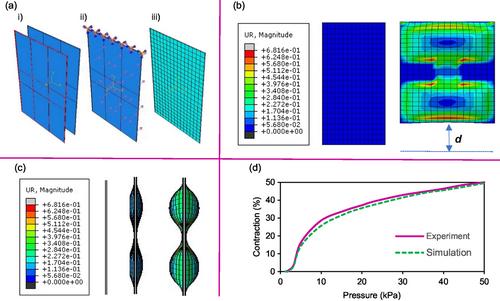
Soft pouch motors, engineered to mimic the natural movements of skeletal muscles, play a crucial role in advancing robotics and exoskeleton development. However, the fabrication techniques often involve multistage processes; they lack soft sensing capabilities and are sensitive to cutting and damage. This work introduces a new textile-based pouch motors with the capacity for biaxial actuation and capacitive sensory functions, achieved through the application of computerized knitting technology using ultrahigh molecular weight polyethylene yarn (Spectra) and conductive silver yarns. This method enables the rapid and scalable mass fabrication of robust pouch motors. The resulting pouch motors exhibit maximum lifting capacity of 10 kg, maximum contraction of 53.3% along the y-axis, and transverse extension of 41.18% along the x-axis at 50 kPa pressure. Finite element analysis closely matches the experimental data. The capacitance signals in relation to contraction motion are well suited for detecting air pressure levels and hold promise for applications requiring robotic control. Notably, it effectively elevates an ankle joint simulator at a 20° angle, highlighting its potential for applications such assisting individuals with foot drop. This study presents a practical demonstration of the soft ankle exosuit designed to provide lifting support for individuals facing this mobility challenge.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
