Chidanand Hegde, Ravi Chaithanya Mysa, Aaron Chooi, Saikrishna Dontu, Joel Ming Rui Tan, Lydia Helena Wong, Pablo Valdivia y Alvarado, Shlomo Magdassi
{"title":"3D-Printed Mechano-Optic Force Sensor for Soft Robotic Gripper Enabled by Programmable Structural Metamaterials","authors":"Chidanand Hegde, Ravi Chaithanya Mysa, Aaron Chooi, Saikrishna Dontu, Joel Ming Rui Tan, Lydia Helena Wong, Pablo Valdivia y Alvarado, Shlomo Magdassi","doi":"10.1002/aisy.202400057","DOIUrl":null,"url":null,"abstract":"<p>Rapid deployment of automation in today's world has opened up exciting possibilities in the realm of design and fabrication of soft robotic grippers endowed with sensing capabilities. Herein, a novel design and rapid fabrication by 3D printing of a mechano-optic force sensor with a large dynamic range, sensitivity, and linear response, enabled by metamaterials-based structures, is presented. A simple approach for programming the metamaterial's behavior based on mathematical modeling of the sensor under dynamic loading is proposed. Machine learning models are utilized to predict the complete force–deformation profile, encompassing the linear range, the onset of nonlinear behavior, and the slope of profiles in both bending and compression-dominated regions. The design supports seamless integration of the sensor into soft grippers, enabling 3D printing of the soft gripper with an embedded sensor in a single step, thus overcoming the tedious and complex and multiple fabrication steps commonly applied in conventional processes. The sensor boasts a fine resolution of 0.015 N, a measurement range up to 16 N, linearity (adj. <i>R</i><sup>2</sup>–0.991), and delivers consistent performance beyond 100 000 cycles. The sensitivity and range of the embedded mechano-optic force sensor can be easily programmed by both the metamaterial structure and the material's properties.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 9","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2024-06-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400057","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400057","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
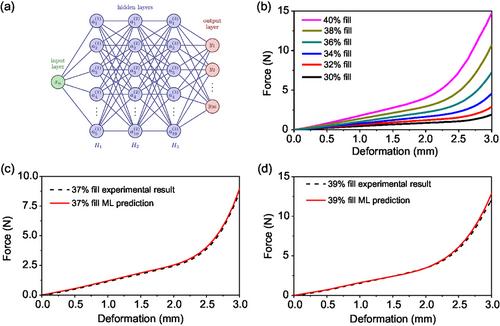
Rapid deployment of automation in today's world has opened up exciting possibilities in the realm of design and fabrication of soft robotic grippers endowed with sensing capabilities. Herein, a novel design and rapid fabrication by 3D printing of a mechano-optic force sensor with a large dynamic range, sensitivity, and linear response, enabled by metamaterials-based structures, is presented. A simple approach for programming the metamaterial's behavior based on mathematical modeling of the sensor under dynamic loading is proposed. Machine learning models are utilized to predict the complete force–deformation profile, encompassing the linear range, the onset of nonlinear behavior, and the slope of profiles in both bending and compression-dominated regions. The design supports seamless integration of the sensor into soft grippers, enabling 3D printing of the soft gripper with an embedded sensor in a single step, thus overcoming the tedious and complex and multiple fabrication steps commonly applied in conventional processes. The sensor boasts a fine resolution of 0.015 N, a measurement range up to 16 N, linearity (adj. R2–0.991), and delivers consistent performance beyond 100 000 cycles. The sensitivity and range of the embedded mechano-optic force sensor can be easily programmed by both the metamaterial structure and the material's properties.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
