Jinsuk Choi , Wookyong Kwon , Kwanwoong Yoon , Seongwon Yoon , Young Sam Lee , Soo Jeon , Soohee Han
{"title":"Suppressing violent sloshing flow in food serving robots","authors":"Jinsuk Choi , Wookyong Kwon , Kwanwoong Yoon , Seongwon Yoon , Young Sam Lee , Soo Jeon , Soohee Han","doi":"10.1016/j.robot.2024.104728","DOIUrl":null,"url":null,"abstract":"<div><p>This article presents the self-balancing slosh-free control (SBSFC) scheme, a notable advancement for stable navigation in food-serving robots. The uniqueness of SBSFC is that it does not require direct modeling of slosh dynamics. Utilizing just two inertial measurement units (IMUs), the proposed scheme offers an online solution, obviating the need for complex dynamics or high-cost supplementary systems. Central to this work is the design of a control strategy favorable for sloshing suppression, achieved through feedforward reference shaping and disturbance compensation. This means the SBSFC indirectly alleviates and compensates for sloshing effects, rather than directly controlling them as a state variable by relying on pixel-based measurements of sloshing. Key contributions include rapid slosh damping via reference shaping, robust posture stabilization through optimal control, and enhanced disturbance handling with a disturbance observer. These strategies synergistically ensure immediate vibration reduction and long-term stability under real-world conditions. This study is expected to lead to a significant leap forward in commercial food-serving robotics.</p></div>","PeriodicalId":49592,"journal":{"name":"Robotics and Autonomous Systems","volume":"179 ","pages":"Article 104728"},"PeriodicalIF":5.2000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Autonomous Systems","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S092188902400112X","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/5/29 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
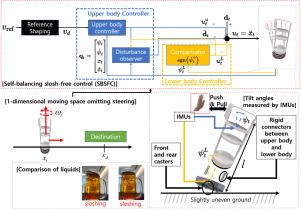
This article presents the self-balancing slosh-free control (SBSFC) scheme, a notable advancement for stable navigation in food-serving robots. The uniqueness of SBSFC is that it does not require direct modeling of slosh dynamics. Utilizing just two inertial measurement units (IMUs), the proposed scheme offers an online solution, obviating the need for complex dynamics or high-cost supplementary systems. Central to this work is the design of a control strategy favorable for sloshing suppression, achieved through feedforward reference shaping and disturbance compensation. This means the SBSFC indirectly alleviates and compensates for sloshing effects, rather than directly controlling them as a state variable by relying on pixel-based measurements of sloshing. Key contributions include rapid slosh damping via reference shaping, robust posture stabilization through optimal control, and enhanced disturbance handling with a disturbance observer. These strategies synergistically ensure immediate vibration reduction and long-term stability under real-world conditions. This study is expected to lead to a significant leap forward in commercial food-serving robotics.
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
