{"title":"High-performance electrically responsive artificial muscle materials for soft robot actuation","authors":"Liang Yang, Hong Wang","doi":"10.1016/j.actbio.2024.07.016","DOIUrl":null,"url":null,"abstract":"<div><p><span>Traditional robotic devices are often bulky and rigid, making it difficult for them to adapt to the soft and complex shapes of the human body. In stark contrast, soft robots<span>, as a burgeoning class of robotic technology, showcase exceptional flexibility and adaptability, positioning them as compelling contenders for a diverse array of applications. High-performance electrically responsive artificial muscle materials (ERAMMs), as key driving components of soft robots, can achieve efficient motion and deformation, as well as more flexible and precise robot control, attracting widespread attention. This paper reviews the latest advancements in high-performance ERAMMs and their applications in the field of soft robot actuation<span>, using ionic polymer-metal composites and dielectric </span></span></span>elastomers<span> as typical cases. Firstly, the definition, characteristics, and electro-driven working principles of high-performance ERAMMs are introduced. Then, the material design and synthesis, fabrication processes and optimization, as well as characterization and testing methods of the ERAMMs are summarized. Furthermore, various applications of two typical ERAMMs in the field of soft robot actuation are discussed in detail. Finally, the challenges and future directions in current research are analyzed and anticipated. This review paper aims to provide researchers with a reference for understanding the latest research progress in high-performance ERAMMs and to guide the development and application of soft robots.</span></p></div><div><h3>Statement of significance</h3><p></p><ul><li><span>•</span><span><p>Inspired by the good performance of natural muscles, extensive attention has been paid to the study of artificial muscles. Based on the structure and properties of artificial muscles, the research progress of high-performance artificial muscle materials is systematically reviewed, the working principle of the device-driven deformation is comprehensively analyzed, and the material design, preparation process and characterization methods are deeply analyzed.</p></span></li><li><span>•</span><span><p>The opportunities and challenges of high-performance artificial muscle materials, especially ionic polymer-metal composites and dielectric elastomers, are discussed, and their future research directions are proposed, laying the foundation for further innovative research on artificial muscle materials and their application development in the field of soft robot actuation.</p></span></li></ul></div>","PeriodicalId":237,"journal":{"name":"Acta Biomaterialia","volume":"185 ","pages":"Pages 24-40"},"PeriodicalIF":9.6000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Acta Biomaterialia","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S174270612400391X","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Traditional robotic devices are often bulky and rigid, making it difficult for them to adapt to the soft and complex shapes of the human body. In stark contrast, soft robots, as a burgeoning class of robotic technology, showcase exceptional flexibility and adaptability, positioning them as compelling contenders for a diverse array of applications. High-performance electrically responsive artificial muscle materials (ERAMMs), as key driving components of soft robots, can achieve efficient motion and deformation, as well as more flexible and precise robot control, attracting widespread attention. This paper reviews the latest advancements in high-performance ERAMMs and their applications in the field of soft robot actuation, using ionic polymer-metal composites and dielectric elastomers as typical cases. Firstly, the definition, characteristics, and electro-driven working principles of high-performance ERAMMs are introduced. Then, the material design and synthesis, fabrication processes and optimization, as well as characterization and testing methods of the ERAMMs are summarized. Furthermore, various applications of two typical ERAMMs in the field of soft robot actuation are discussed in detail. Finally, the challenges and future directions in current research are analyzed and anticipated. This review paper aims to provide researchers with a reference for understanding the latest research progress in high-performance ERAMMs and to guide the development and application of soft robots.
Statement of significance
•
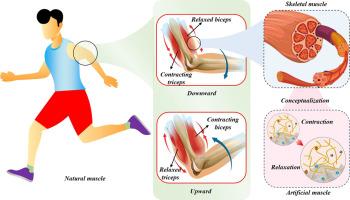
Inspired by the good performance of natural muscles, extensive attention has been paid to the study of artificial muscles. Based on the structure and properties of artificial muscles, the research progress of high-performance artificial muscle materials is systematically reviewed, the working principle of the device-driven deformation is comprehensively analyzed, and the material design, preparation process and characterization methods are deeply analyzed.
•
The opportunities and challenges of high-performance artificial muscle materials, especially ionic polymer-metal composites and dielectric elastomers, are discussed, and their future research directions are proposed, laying the foundation for further innovative research on artificial muscle materials and their application development in the field of soft robot actuation.
期刊介绍:
Acta Biomaterialia is a monthly peer-reviewed scientific journal published by Elsevier. The journal was established in January 2005. The editor-in-chief is W.R. Wagner (University of Pittsburgh). The journal covers research in biomaterials science, including the interrelationship of biomaterial structure and function from macroscale to nanoscale. Topical coverage includes biomedical and biocompatible materials.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
