{"title":"Design and batch fabrication of anisotropic microparticles toward small-scale robots using microfluidics: recent advances","authors":"Chaoyu Yang, Xurui Liu, Xin Song and Li Zhang","doi":"10.1039/D4LC00566J","DOIUrl":null,"url":null,"abstract":"<p >Small-scale robots with shape anisotropy have garnered significant scientific interest due to their enhanced mobility and precise control in recent years. Traditionally, these miniature robots are manufactured using established techniques such as molding, 3D printing, and microfabrication. However, the advent of microfluidics in recent years has emerged as a promising manufacturing technology, capitalizing on the precise and dynamic manipulation of fluids at the microscale to fabricate various complex-shaped anisotropic particles. This offers a versatile and controlled platform, enabling the efficient fabrication of small-scale robots with tailored morphologies and advanced functionalities from the microfluidic-derived anisotropic microparticles at high throughput. This review highlights the recent advances in the microfluidic fabrication of anisotropic microparticles and their potential applications in small-scale robots. In this review, the term ‘small-scale robots’ broadly encompasses micromotors endowed with capabilities for locomotion and manipulation. Firstly, the fundamental strategies for liquid template formation and the methodologies for generating anisotropic microparticles within the microfluidic system are briefly introduced. Subsequently, the functionality of shape-anisotropic particles in forming components for small-scale robots and actuation mechanisms are emphasized. Attention is then directed towards the diverse applications of these microparticle-derived microrobots in a variety of fields, including pollution remediation, cell microcarriers, drug delivery, and biofilm eradication. Finally, we discuss future directions for the fabrication and development of miniature robots from microfluidics, shedding light on the evolving landscape of this field.</p>","PeriodicalId":85,"journal":{"name":"Lab on a Chip","volume":" 19","pages":" 4514-4535"},"PeriodicalIF":5.4000,"publicationDate":"2024-08-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Lab on a Chip","FirstCategoryId":"5","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/lc/d4lc00566j","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"BIOCHEMICAL RESEARCH METHODS","Score":null,"Total":0}
引用次数: 0
Abstract
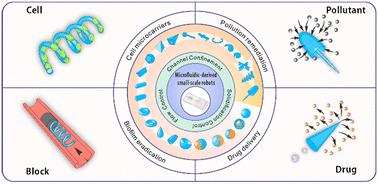
Small-scale robots with shape anisotropy have garnered significant scientific interest due to their enhanced mobility and precise control in recent years. Traditionally, these miniature robots are manufactured using established techniques such as molding, 3D printing, and microfabrication. However, the advent of microfluidics in recent years has emerged as a promising manufacturing technology, capitalizing on the precise and dynamic manipulation of fluids at the microscale to fabricate various complex-shaped anisotropic particles. This offers a versatile and controlled platform, enabling the efficient fabrication of small-scale robots with tailored morphologies and advanced functionalities from the microfluidic-derived anisotropic microparticles at high throughput. This review highlights the recent advances in the microfluidic fabrication of anisotropic microparticles and their potential applications in small-scale robots. In this review, the term ‘small-scale robots’ broadly encompasses micromotors endowed with capabilities for locomotion and manipulation. Firstly, the fundamental strategies for liquid template formation and the methodologies for generating anisotropic microparticles within the microfluidic system are briefly introduced. Subsequently, the functionality of shape-anisotropic particles in forming components for small-scale robots and actuation mechanisms are emphasized. Attention is then directed towards the diverse applications of these microparticle-derived microrobots in a variety of fields, including pollution remediation, cell microcarriers, drug delivery, and biofilm eradication. Finally, we discuss future directions for the fabrication and development of miniature robots from microfluidics, shedding light on the evolving landscape of this field.
期刊介绍:
Lab on a Chip is the premiere journal that publishes cutting-edge research in the field of miniaturization. By their very nature, microfluidic/nanofluidic/miniaturized systems are at the intersection of disciplines, spanning fundamental research to high-end application, which is reflected by the broad readership of the journal. Lab on a Chip publishes two types of papers on original research: full-length research papers and communications. Papers should demonstrate innovations, which can come from technical advancements or applications addressing pressing needs in globally important areas. The journal also publishes Comments, Reviews, and Perspectives.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
