Paul Henke, Johanna Meier, Leo Ruehrmund, Saskia A Brendle, Sven Krueger, Thomas M Grupp, Christoph Lutter, Christoph Woernle, Rainer Bader, Maeruan Kebbach
{"title":"Modeling of the native knee with kinematic data derived from experiments using the VIVO™ joint simulator: a feasibility study.","authors":"Paul Henke, Johanna Meier, Leo Ruehrmund, Saskia A Brendle, Sven Krueger, Thomas M Grupp, Christoph Lutter, Christoph Woernle, Rainer Bader, Maeruan Kebbach","doi":"10.1186/s12938-024-01279-z","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Despite advances in total knee arthroplasty, many patients are still unsatisfied with the functional outcome. Multibody simulations enable a more efficient exploration of independent variables compared to experimental studies. However, to what extent numerical models can fully reproduce knee joint kinematics is still unclear. Hence, models must be validated with different test scenarios before being applied to biomechanical questions.</p><p><strong>Methods: </strong>In our feasibility study, we analyzed a human knee specimen on a six degree of freedom joint simulator, applying a passive flexion and different laxity tests with sequential states of ligament resection while recording the joint kinematics. Simultaneously, we generated a subject-specific multibody model of the native tibiofemoral joint considering ligaments and contact between articulating cartilage surfaces.</p><p><strong>Results: </strong>Our experimental data on the sequential states of ligament resection aligned well with the literature. The model-based knee joint kinematics during passive flexion showed good agreement with the experiment, with root-mean-square errors of less than 1.61 mm for translations and 2.1° for knee joint rotations. During laxity tests, the experiment measured up to 8 mm of anteroposterior laxity, while the numerical model allowed less than 3 mm.</p><p><strong>Conclusion: </strong>Although the multibody model showed good agreement to the experimental kinematics during passive flexion, the validation showed that ligament parameters used in this feasibility study are too stiff to replicate experimental laxity tests correctly. Hence, more precise subject-specific ligament parameters have to be identified in the future through model optimization.</p>","PeriodicalId":8927,"journal":{"name":"BioMedical Engineering OnLine","volume":"23 1","pages":"85"},"PeriodicalIF":2.9000,"publicationDate":"2024-08-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11342559/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"BioMedical Engineering OnLine","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12938-024-01279-z","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Background: Despite advances in total knee arthroplasty, many patients are still unsatisfied with the functional outcome. Multibody simulations enable a more efficient exploration of independent variables compared to experimental studies. However, to what extent numerical models can fully reproduce knee joint kinematics is still unclear. Hence, models must be validated with different test scenarios before being applied to biomechanical questions.
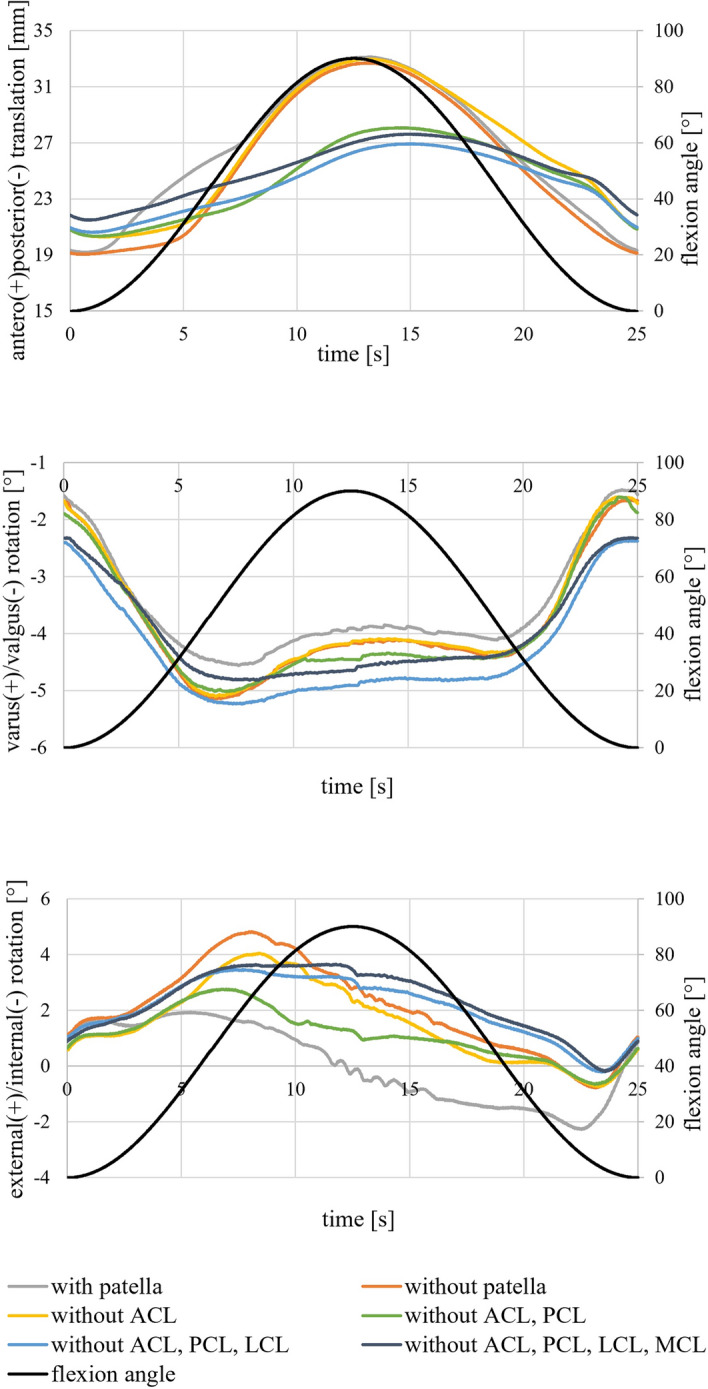
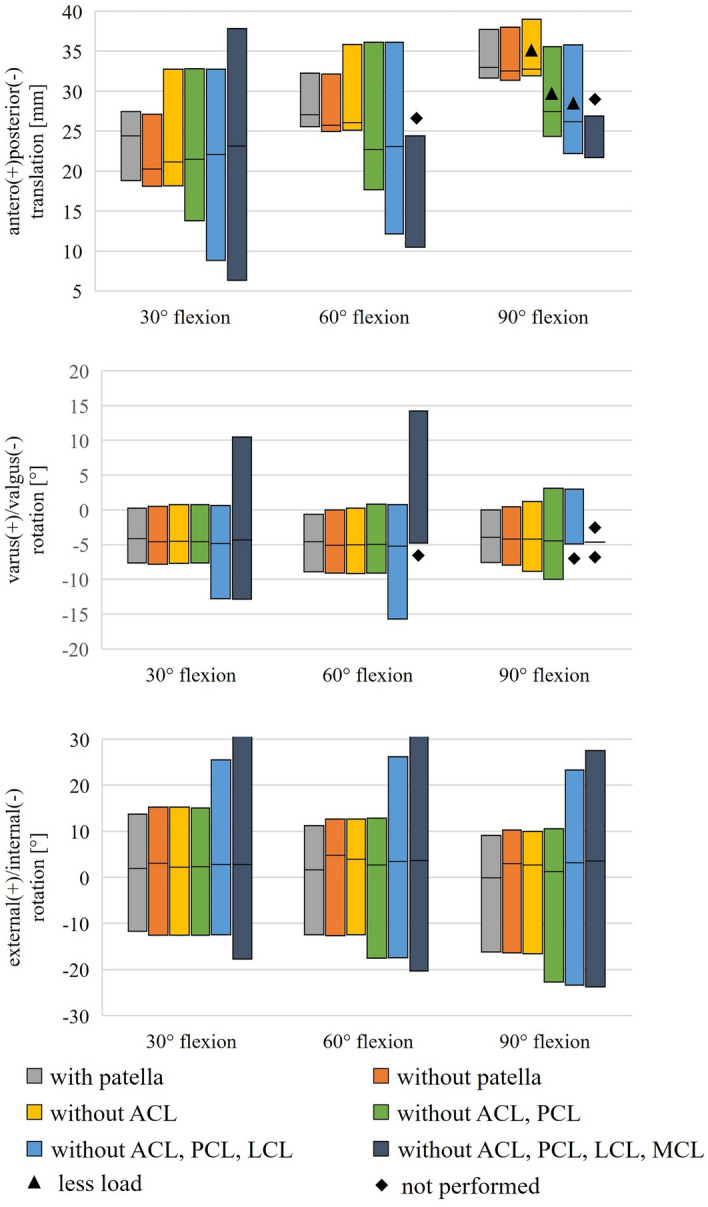
Methods: In our feasibility study, we analyzed a human knee specimen on a six degree of freedom joint simulator, applying a passive flexion and different laxity tests with sequential states of ligament resection while recording the joint kinematics. Simultaneously, we generated a subject-specific multibody model of the native tibiofemoral joint considering ligaments and contact between articulating cartilage surfaces.
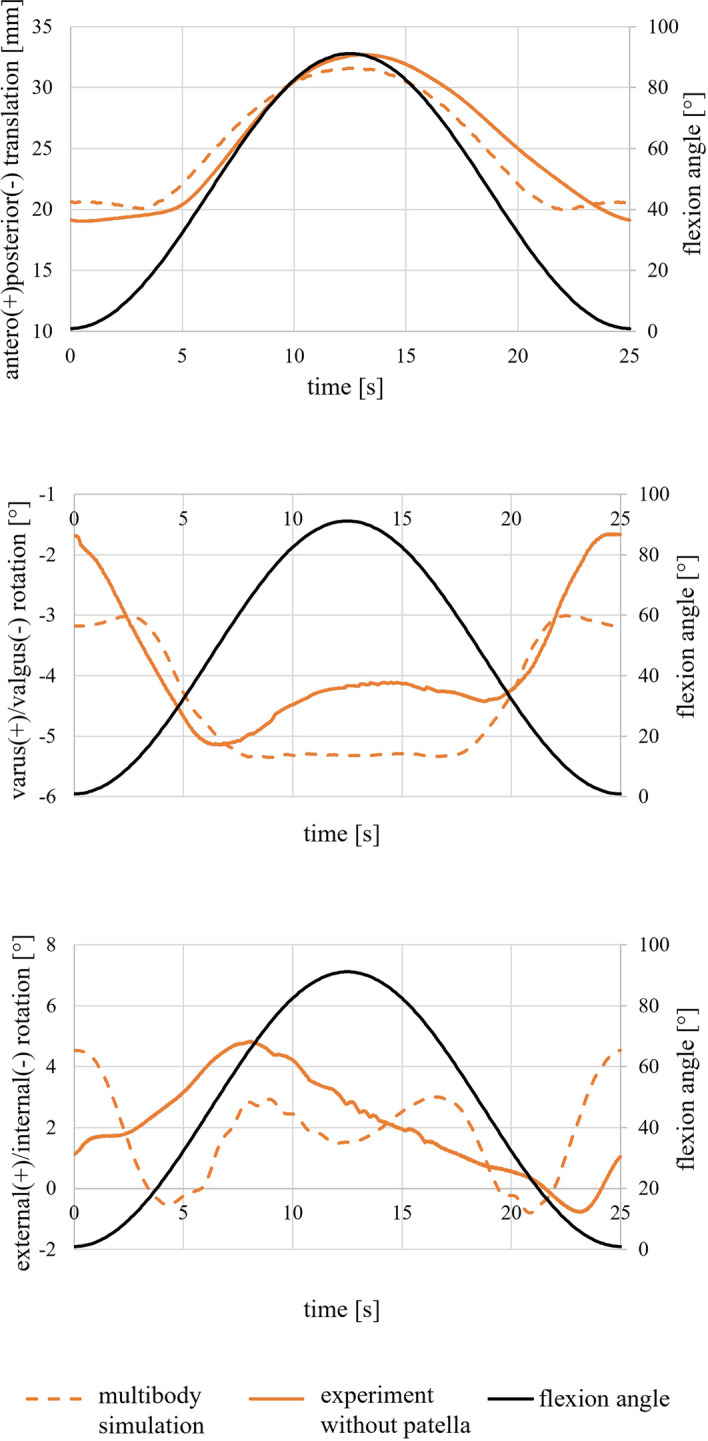
Results: Our experimental data on the sequential states of ligament resection aligned well with the literature. The model-based knee joint kinematics during passive flexion showed good agreement with the experiment, with root-mean-square errors of less than 1.61 mm for translations and 2.1° for knee joint rotations. During laxity tests, the experiment measured up to 8 mm of anteroposterior laxity, while the numerical model allowed less than 3 mm.
Conclusion: Although the multibody model showed good agreement to the experimental kinematics during passive flexion, the validation showed that ligament parameters used in this feasibility study are too stiff to replicate experimental laxity tests correctly. Hence, more precise subject-specific ligament parameters have to be identified in the future through model optimization.
期刊介绍:
BioMedical Engineering OnLine is an open access, peer-reviewed journal that is dedicated to publishing research in all areas of biomedical engineering.
BioMedical Engineering OnLine is aimed at readers and authors throughout the world, with an interest in using tools of the physical and data sciences and techniques in engineering to understand and solve problems in the biological and medical sciences. Topical areas include, but are not limited to:
Bioinformatics-
Bioinstrumentation-
Biomechanics-
Biomedical Devices & Instrumentation-
Biomedical Signal Processing-
Healthcare Information Systems-
Human Dynamics-
Neural Engineering-
Rehabilitation Engineering-
Biomaterials-
Biomedical Imaging & Image Processing-
BioMEMS and On-Chip Devices-
Bio-Micro/Nano Technologies-
Biomolecular Engineering-
Biosensors-
Cardiovascular Systems Engineering-
Cellular Engineering-
Clinical Engineering-
Computational Biology-
Drug Delivery Technologies-
Modeling Methodologies-
Nanomaterials and Nanotechnology in Biomedicine-
Respiratory Systems Engineering-
Robotics in Medicine-
Systems and Synthetic Biology-
Systems Biology-
Telemedicine/Smartphone Applications in Medicine-
Therapeutic Systems, Devices and Technologies-
Tissue Engineering



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
