{"title":"Brain-inspired biomimetic robot control: a review.","authors":"Adrià Mompó Alepuz, Dimitrios Papageorgiou, Silvia Tolu","doi":"10.3389/fnbot.2024.1395617","DOIUrl":null,"url":null,"abstract":"<p><p>Complex robotic systems, such as humanoid robot hands, soft robots, and walking robots, pose a challenging control problem due to their high dimensionality and heavy non-linearities. Conventional model-based feedback controllers demonstrate robustness and stability but struggle to cope with the escalating system design and tuning complexity accompanying larger dimensions. In contrast, data-driven methods such as artificial neural networks excel at representing high-dimensional data but lack robustness, generalization, and real-time adaptiveness. In response to these challenges, researchers are directing their focus to biological paradigms, drawing inspiration from the remarkable control capabilities inherent in the human body. This has motivated the exploration of new control methods aimed at closely emulating the motor functions of the brain given the current insights in neuroscience. Recent investigation into these <i>Brain-Inspired</i> control techniques have yielded promising results, notably in tasks involving trajectory tracking and robot locomotion. This paper presents a comprehensive review of the foremost trends in biomimetic brain-inspired control methods to tackle the intricacies associated with controlling complex robotic systems.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1395617"},"PeriodicalIF":2.8000,"publicationDate":"2024-08-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11366706/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1395617","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
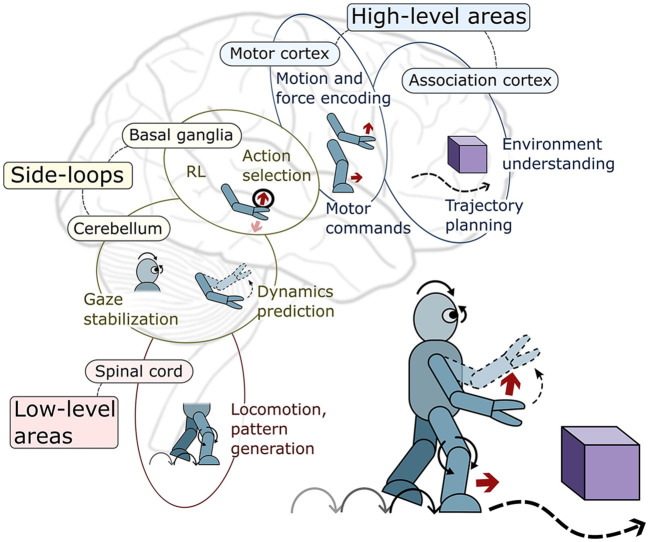
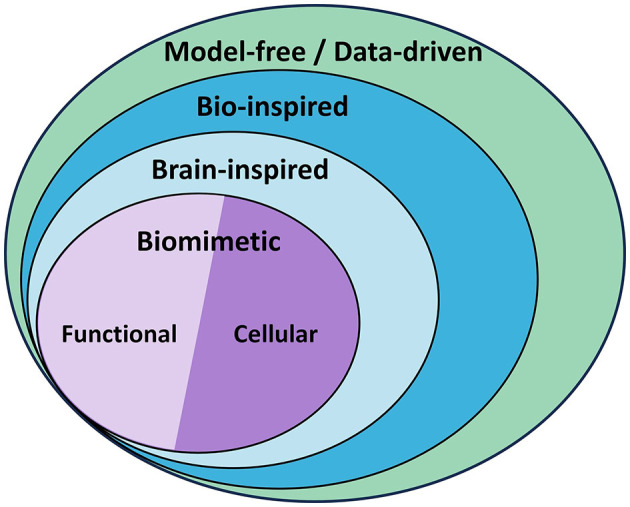
Complex robotic systems, such as humanoid robot hands, soft robots, and walking robots, pose a challenging control problem due to their high dimensionality and heavy non-linearities. Conventional model-based feedback controllers demonstrate robustness and stability but struggle to cope with the escalating system design and tuning complexity accompanying larger dimensions. In contrast, data-driven methods such as artificial neural networks excel at representing high-dimensional data but lack robustness, generalization, and real-time adaptiveness. In response to these challenges, researchers are directing their focus to biological paradigms, drawing inspiration from the remarkable control capabilities inherent in the human body. This has motivated the exploration of new control methods aimed at closely emulating the motor functions of the brain given the current insights in neuroscience. Recent investigation into these Brain-Inspired control techniques have yielded promising results, notably in tasks involving trajectory tracking and robot locomotion. This paper presents a comprehensive review of the foremost trends in biomimetic brain-inspired control methods to tackle the intricacies associated with controlling complex robotic systems.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
