{"title":"Modeling magnetic soft continuum robot in nonuniform magnetic fields via energy minimization","authors":"Jiyu Li , Liu Wang","doi":"10.1016/j.ijmecsci.2024.109688","DOIUrl":null,"url":null,"abstract":"<div><p>The emerging magnetic soft continuum robots (MSCRs) – a type of slender and soft rods with embedded hard-magnetic particles – hold great promise in endovascular intervention via remote magnetic actuation. Although numerous advantages of using permanent magnets have been demonstrated for manipulating MSCRs (e.g., simple systems with high actuation force, large operating workspace), the magneto-mechanical behavior of MSCRs in nonuniform magnetic fields, particularly those generated by permanent magnets, remains largely unexplored. In this work, a systematic study of MSCRs in the nonuniform field is presented, which includes theoretical modeling using hard-magnetic elastica theory, numerical analyses by energy minimization method, finite element simulations using ABAQUS user element (UEL), and experimental validation. Without solving governing differential equations, the large deflection of MSCRs is efficiently obtained via the minimization of the total potential energy using sequential quadratic programming (SQP). This efficient modeling method offers insights into the control of MSCRs using nonuniform magnetic fields. Two practical strategies are provided for precisely controlling MSCRs by manipulating a cubic magnet through the adjustment of the actuation distance, rotation angle, and spin angle, laying the foundation for applications of magnetically-assisted endovascular intervention.</p></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"282 ","pages":"Article 109688"},"PeriodicalIF":9.4000,"publicationDate":"2024-08-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S002074032400729X","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
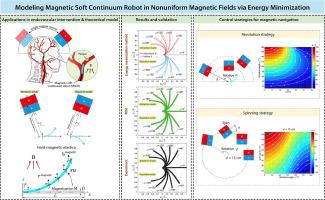
The emerging magnetic soft continuum robots (MSCRs) – a type of slender and soft rods with embedded hard-magnetic particles – hold great promise in endovascular intervention via remote magnetic actuation. Although numerous advantages of using permanent magnets have been demonstrated for manipulating MSCRs (e.g., simple systems with high actuation force, large operating workspace), the magneto-mechanical behavior of MSCRs in nonuniform magnetic fields, particularly those generated by permanent magnets, remains largely unexplored. In this work, a systematic study of MSCRs in the nonuniform field is presented, which includes theoretical modeling using hard-magnetic elastica theory, numerical analyses by energy minimization method, finite element simulations using ABAQUS user element (UEL), and experimental validation. Without solving governing differential equations, the large deflection of MSCRs is efficiently obtained via the minimization of the total potential energy using sequential quadratic programming (SQP). This efficient modeling method offers insights into the control of MSCRs using nonuniform magnetic fields. Two practical strategies are provided for precisely controlling MSCRs by manipulating a cubic magnet through the adjustment of the actuation distance, rotation angle, and spin angle, laying the foundation for applications of magnetically-assisted endovascular intervention.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
