Anthony J Anderson, Kira A Gauthier, Mathew Sunil Varre, Kimberly A Nickerson, Brittney C Muir, Patrick M Aubin
{"title":"A robotic emulator for the systematic exploration of transtibial biarticular prosthesis designs.","authors":"Anthony J Anderson, Kira A Gauthier, Mathew Sunil Varre, Kimberly A Nickerson, Brittney C Muir, Patrick M Aubin","doi":"10.1177/20556683241280733","DOIUrl":null,"url":null,"abstract":"<p><p>People with transtibial limb loss frequently experience suboptimal gait outcomes. This is partly attributable to the absence of the biarticular gastrocnemius muscle, which plays a unique role in walking. Although a recent surge of biarticular prostheses aims to restore gastrocnemius function, the broad design space and lack of consensus on optimal hardware and control strategies present scientific and engineering challenges. This study introduces a robotic biarticular prosthesis emulator, comprising a uniarticular ankle-foot prosthesis and knee flexion exoskeleton, each actuated by a custom off-board system. Benchtop experiments were conducted to characterize the emulator's mechatronic performance. Walking experiments with one transtibial amputee demonstrated the system's capability to provide knee and ankle assistance. The -3 dB bandwidths for the knee exoskeleton's torque and motor velocity controllers were measured at approximately 5 Hz and 100 Hz, respectively. A feedforward iterative learning controller reduced the root-mean-squared torque tracking error from 6.04 Nm to 0.99 Nm in hardware-in-the-loop experiments, an 84% improvement. User-preference-based tuning yielded a peak knee torque of approximately 20% of the estimated biological knee moment. This biarticular prosthesis emulator demonstrates significant potential as a versatile research platform that can offer valuable insights for the advancement of lower-limb assistive devices.</p>","PeriodicalId":43319,"journal":{"name":"Journal of Rehabilitation and Assistive Technologies Engineering","volume":"11 ","pages":"20556683241280733"},"PeriodicalIF":2.0000,"publicationDate":"2024-09-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11406492/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Rehabilitation and Assistive Technologies Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/20556683241280733","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
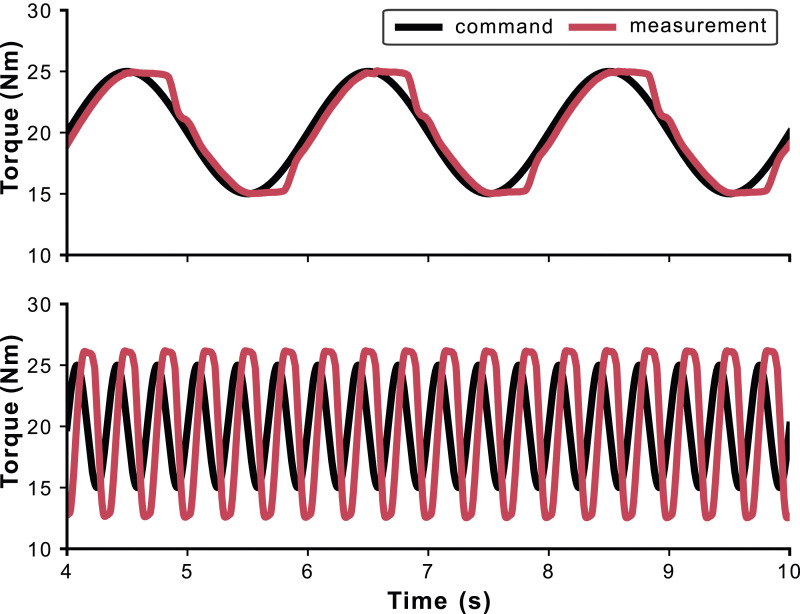
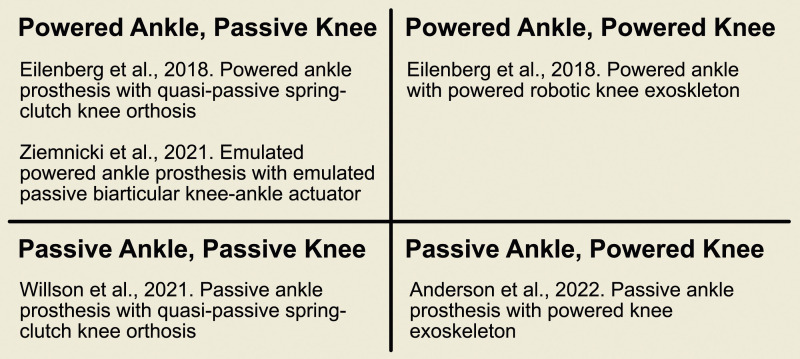
People with transtibial limb loss frequently experience suboptimal gait outcomes. This is partly attributable to the absence of the biarticular gastrocnemius muscle, which plays a unique role in walking. Although a recent surge of biarticular prostheses aims to restore gastrocnemius function, the broad design space and lack of consensus on optimal hardware and control strategies present scientific and engineering challenges. This study introduces a robotic biarticular prosthesis emulator, comprising a uniarticular ankle-foot prosthesis and knee flexion exoskeleton, each actuated by a custom off-board system. Benchtop experiments were conducted to characterize the emulator's mechatronic performance. Walking experiments with one transtibial amputee demonstrated the system's capability to provide knee and ankle assistance. The -3 dB bandwidths for the knee exoskeleton's torque and motor velocity controllers were measured at approximately 5 Hz and 100 Hz, respectively. A feedforward iterative learning controller reduced the root-mean-squared torque tracking error from 6.04 Nm to 0.99 Nm in hardware-in-the-loop experiments, an 84% improvement. User-preference-based tuning yielded a peak knee torque of approximately 20% of the estimated biological knee moment. This biarticular prosthesis emulator demonstrates significant potential as a versatile research platform that can offer valuable insights for the advancement of lower-limb assistive devices.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
