Philipp Aebischer, Lukas Anschuetz, Marco Caversaccio, Georgios Mantokoudis, Stefan Weder
{"title":"Quantitative in-vitro assessment of a novel robot-assisted system for cochlear implant electrode insertion.","authors":"Philipp Aebischer, Lukas Anschuetz, Marco Caversaccio, Georgios Mantokoudis, Stefan Weder","doi":"10.1007/s11548-024-03276-y","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>As an increasing number of cochlear implant candidates exhibit residual inner ear function, hearing preservation strategies during implant insertion are gaining importance. Manual implantation is known to induce traumatic force and pressure peaks. In this study, we use a validated in-vitro model to comprehensively evaluate a novel surgical tool that addresses these challenges through motorized movement of a forceps.</p><p><strong>Methods: </strong>Using lateral wall electrodes, we examined two subgroups of insertions: 30 insertions were performed manually by experienced surgeons, and another 30 insertions were conducted with a robot-assisted system under the same surgeons' supervision. We utilized a realistic, validated model of the temporal bone. This model accurately reproduces intracochlear frictional conditions and allows for the synchronous recording of forces on intracochlear structures, intracochlear pressure, and the position and deformation of the electrode array within the scala tympani.</p><p><strong>Results: </strong>We identified a significant reduction in force variation during robot-assisted insertions compared to the conventional procedure, with average values of 12 mN/s and 32 mN/s, respectively. Robotic assistance was also associated with a significant reduction of strong pressure peaks and a 17 dB reduction in intracochlear pressure levels. Furthermore, our study highlights that the release of the insertion tool represents a critical phase requiring surgical training.</p><p><strong>Conclusion: </strong>Robotic assistance demonstrated more consistent insertion speeds compared to manual techniques. Its use can significantly reduce factors associated with intracochlear trauma, highlighting its potential for improved hearing preservation. Finally, the system does not mitigate the impact of subsequent surgical steps like electrode cable routing and cochlear access sealing, pointing to areas in need of further research.</p>","PeriodicalId":51251,"journal":{"name":"International Journal of Computer Assisted Radiology and Surgery","volume":" ","pages":"323-332"},"PeriodicalIF":2.3000,"publicationDate":"2025-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11807918/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Computer Assisted Radiology and Surgery","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11548-024-03276-y","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/1 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
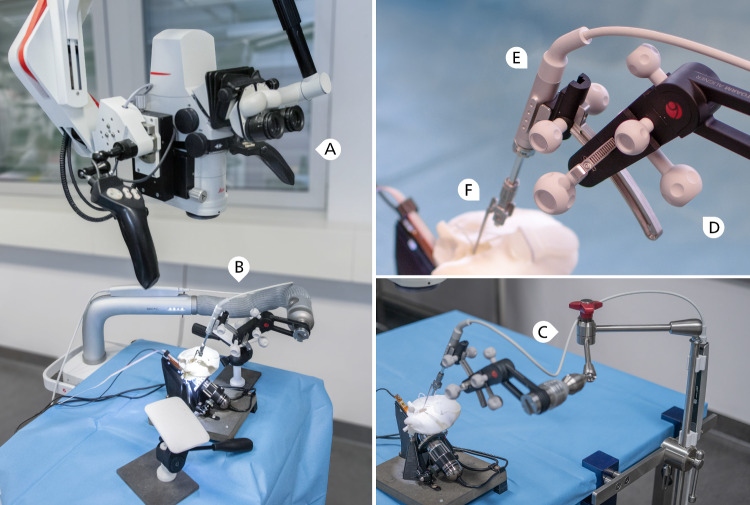
Purpose: As an increasing number of cochlear implant candidates exhibit residual inner ear function, hearing preservation strategies during implant insertion are gaining importance. Manual implantation is known to induce traumatic force and pressure peaks. In this study, we use a validated in-vitro model to comprehensively evaluate a novel surgical tool that addresses these challenges through motorized movement of a forceps.
Methods: Using lateral wall electrodes, we examined two subgroups of insertions: 30 insertions were performed manually by experienced surgeons, and another 30 insertions were conducted with a robot-assisted system under the same surgeons' supervision. We utilized a realistic, validated model of the temporal bone. This model accurately reproduces intracochlear frictional conditions and allows for the synchronous recording of forces on intracochlear structures, intracochlear pressure, and the position and deformation of the electrode array within the scala tympani.
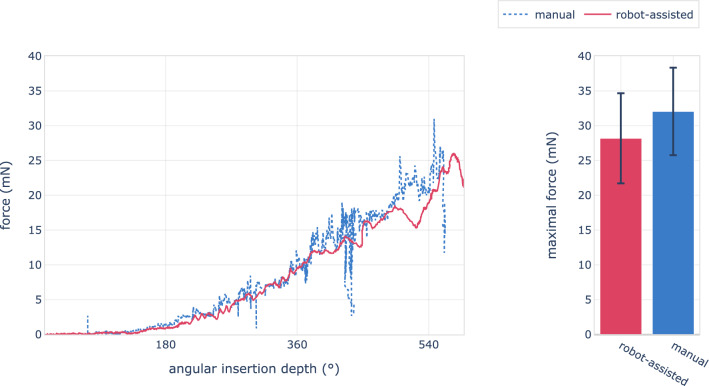
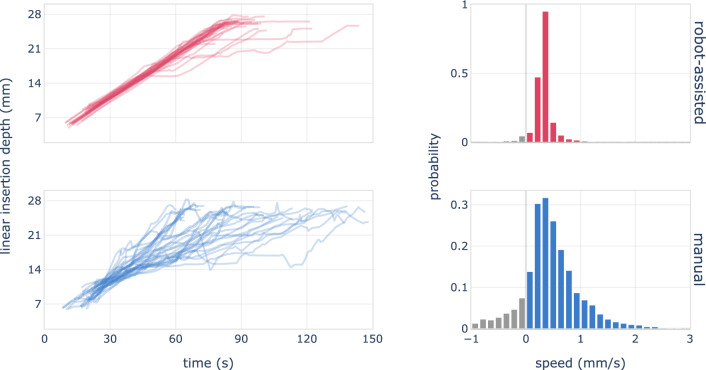
Results: We identified a significant reduction in force variation during robot-assisted insertions compared to the conventional procedure, with average values of 12 mN/s and 32 mN/s, respectively. Robotic assistance was also associated with a significant reduction of strong pressure peaks and a 17 dB reduction in intracochlear pressure levels. Furthermore, our study highlights that the release of the insertion tool represents a critical phase requiring surgical training.
Conclusion: Robotic assistance demonstrated more consistent insertion speeds compared to manual techniques. Its use can significantly reduce factors associated with intracochlear trauma, highlighting its potential for improved hearing preservation. Finally, the system does not mitigate the impact of subsequent surgical steps like electrode cable routing and cochlear access sealing, pointing to areas in need of further research.
期刊介绍:
The International Journal for Computer Assisted Radiology and Surgery (IJCARS) is a peer-reviewed journal that provides a platform for closing the gap between medical and technical disciplines, and encourages interdisciplinary research and development activities in an international environment.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
