Adaptive optimal coordination control of perturbed Bilateral Teleoperators with variable time delays using Actor–Critic Reinforcement Learning algorithm
{"title":"Adaptive optimal coordination control of perturbed Bilateral Teleoperators with variable time delays using Actor–Critic Reinforcement Learning algorithm","authors":"Phuong Nam Dao, Quang Phat Nguyen, Manh Hung Vu","doi":"10.1016/j.matcom.2024.09.007","DOIUrl":null,"url":null,"abstract":"<div><div>In this article, we study the unification of coordination control problem between two sides and optimal control effectiveness for an unknown Bilateral Teleoperators (BTs) under variable time delays in communication between two sides and external disturbance. We proposed the control frame of Actor/Critic strategy and the Robust Integral of the Sign of the Error (RISE), in which the synchronization effectiveness is discussed in two sections with different conditions. The sliding variable is given to transform a BT dynamic model into order reduction model, which can be designed more favourable. By fully analysing optimization problem in designing the training weights of Actor/Critic structure based on the property of Hamiltonian term, Reinforcement Learning (RL) control scheme in each side is proposed for a BT system. Consequently, we incorporate the RISE term into proposed control frame to mathematically prove that the tracking errors asymptotically converge to zero. Furthermore, the proposed control strategy can also guarantee the convergence of learning process. Simulation results and the comparisons demonstrate the performance of the proposed control framework.</div></div>","PeriodicalId":49856,"journal":{"name":"Mathematics and Computers in Simulation","volume":"229 ","pages":"Pages 151-175"},"PeriodicalIF":4.4000,"publicationDate":"2025-03-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mathematics and Computers in Simulation","FirstCategoryId":"100","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0378475424003628","RegionNum":2,"RegionCategory":"数学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/5 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
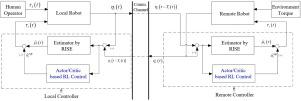
In this article, we study the unification of coordination control problem between two sides and optimal control effectiveness for an unknown Bilateral Teleoperators (BTs) under variable time delays in communication between two sides and external disturbance. We proposed the control frame of Actor/Critic strategy and the Robust Integral of the Sign of the Error (RISE), in which the synchronization effectiveness is discussed in two sections with different conditions. The sliding variable is given to transform a BT dynamic model into order reduction model, which can be designed more favourable. By fully analysing optimization problem in designing the training weights of Actor/Critic structure based on the property of Hamiltonian term, Reinforcement Learning (RL) control scheme in each side is proposed for a BT system. Consequently, we incorporate the RISE term into proposed control frame to mathematically prove that the tracking errors asymptotically converge to zero. Furthermore, the proposed control strategy can also guarantee the convergence of learning process. Simulation results and the comparisons demonstrate the performance of the proposed control framework.
本文研究了在双方通信时间延迟可变和外部干扰的情况下,双方协调控制问题的统一性和未知双边远程操作员(BTs)的最优控制效果。我们提出了 "行动者/批评者"(Actor/Critic)策略和 "误差符号的稳健积分"(Robust Integral of the Sign of the Error,RISE)的控制框架,并在其中分两部分讨论了不同条件下的同步有效性。给出了滑动变量,将 BT 动态模型转化为阶次减少模型,从而更有利于设计。通过全面分析基于哈密顿项的演员/批评者结构训练权重设计的优化问题,为 BT 系统提出了各边的强化学习(RL)控制方案。因此,我们在提议的控制框架中加入了 RISE 项,从数学上证明了跟踪误差渐近收敛为零。此外,所提出的控制策略还能保证学习过程的收敛性。仿真结果和比较证明了所提控制框架的性能。
期刊介绍:
The aim of the journal is to provide an international forum for the dissemination of up-to-date information in the fields of the mathematics and computers, in particular (but not exclusively) as they apply to the dynamics of systems, their simulation and scientific computation in general. Published material ranges from short, concise research papers to more general tutorial articles.
Mathematics and Computers in Simulation, published monthly, is the official organ of IMACS, the International Association for Mathematics and Computers in Simulation (Formerly AICA). This Association, founded in 1955 and legally incorporated in 1956 is a member of FIACC (the Five International Associations Coordinating Committee), together with IFIP, IFAV, IFORS and IMEKO.
Topics covered by the journal include mathematical tools in:
•The foundations of systems modelling
•Numerical analysis and the development of algorithms for simulation
They also include considerations about computer hardware for simulation and about special software and compilers.
The journal also publishes articles concerned with specific applications of modelling and simulation in science and engineering, with relevant applied mathematics, the general philosophy of systems simulation, and their impact on disciplinary and interdisciplinary research.
The journal includes a Book Review section -- and a "News on IMACS" section that contains a Calendar of future Conferences/Events and other information about the Association.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
