{"title":"Backward motion suppression in space-constrained piezoelectric pipeline robots","authors":"Chao Ning , Jichun Xing","doi":"10.1016/j.ijmecsci.2024.109746","DOIUrl":null,"url":null,"abstract":"<div><div>In response to the current challenges of detecting micro pipelines, a micro pipeline robot based on the principle of piezoelectric inertia stick-slip drive was proposed in this paper, which can be effectively applied to the detection and maintenance of micro pipelines. However, during the analysis of the robot's displacement trajectory, it was observed that using inertial drive could cause the backward motion of the robot. This may adversely affect the accuracy and stability of the robot's operation within the micro pipelines. Therefore, a novel control method is derived from the original pipeline robot structure. By affixing piezoelectric sheets to the driving feet of the robot to adjust their deformation and subsequently employing collaborative control of piezoelectric sheets and piezoelectric stacks to regulate friction between the driving feet and the pipe wall, the backward motion of the robot was effectively mitigated. Compared to existing backward motion suppression methods, the approach proposed in this paper has a minimal impact on the actuator's size, allowing for flexible adaptation to various space-constrained applications, while also offering the advantage of a simple control strategy. After determining the structure and working principle, deformation analysis of the driving foot and dynamic simulation analysis of the driving system were conducted. These analyses provide insights into the relationship between mechanical and electrical parameters and output performance within the driving system, thereby validating the feasibility of the control method. Subsequently, a prototype was fabricated, and its output performance was tested. Results demonstrate that this control method can effectively suppress inertial backward motion, achieving a suppression rate close to 100 %. This research presents a novel idea and methodology for mitigating the backward motion of piezoelectric inertial stick-slip actuators with driving foot structures.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"284 ","pages":"Article 109746"},"PeriodicalIF":7.1000,"publicationDate":"2024-10-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324007872","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
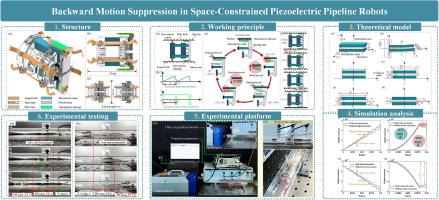
In response to the current challenges of detecting micro pipelines, a micro pipeline robot based on the principle of piezoelectric inertia stick-slip drive was proposed in this paper, which can be effectively applied to the detection and maintenance of micro pipelines. However, during the analysis of the robot's displacement trajectory, it was observed that using inertial drive could cause the backward motion of the robot. This may adversely affect the accuracy and stability of the robot's operation within the micro pipelines. Therefore, a novel control method is derived from the original pipeline robot structure. By affixing piezoelectric sheets to the driving feet of the robot to adjust their deformation and subsequently employing collaborative control of piezoelectric sheets and piezoelectric stacks to regulate friction between the driving feet and the pipe wall, the backward motion of the robot was effectively mitigated. Compared to existing backward motion suppression methods, the approach proposed in this paper has a minimal impact on the actuator's size, allowing for flexible adaptation to various space-constrained applications, while also offering the advantage of a simple control strategy. After determining the structure and working principle, deformation analysis of the driving foot and dynamic simulation analysis of the driving system were conducted. These analyses provide insights into the relationship between mechanical and electrical parameters and output performance within the driving system, thereby validating the feasibility of the control method. Subsequently, a prototype was fabricated, and its output performance was tested. Results demonstrate that this control method can effectively suppress inertial backward motion, achieving a suppression rate close to 100 %. This research presents a novel idea and methodology for mitigating the backward motion of piezoelectric inertial stick-slip actuators with driving foot structures.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
