Lusheng Yuan, Liang Wang, Rui Qi, Yan Li, Chuangye Liu, Gang Luo
{"title":"A 2-DOF piezoelectric platform for cross-scale semiconductor inspection","authors":"Lusheng Yuan, Liang Wang, Rui Qi, Yan Li, Chuangye Liu, Gang Luo","doi":"10.1016/j.ijmecsci.2024.109765","DOIUrl":null,"url":null,"abstract":"<div><div>To address the challenge of achieving extensive travel and high precision in semiconductor inspection, this study proposes a novel 2-DOF cross-scale piezoelectric positioning platform. In semiconductor inspection, the platform utilizes elliptical, stick-slip, and direct-push drive modes to meet the motion requirements at millimeter, micrometer, and nanometer scales. By applying defined electrical signals to the piezoelectric units, the platform can achieve high-speed continuous mode (HCM) for the millimeter scale, low-speed stepping mode (LSM) for the micrometer scale, and high-precision positioning mode (HPM) for the nanometer scale. Theoretical analysis and simulations were performed to design the flexible stator of the platform, and its dynamic characteristics were analyzed. A prototype was fabricated, assembled, and experimentally tested to investigate the mechanical performance of the proposed platform. The results show that the prototype successfully realizes cross-scale motion in the three modes: achieving a maximum no-load speed of 62.47 mm/s in HCM, a low-speed stepping motion of 14.62 μm/s in LSM, and high-precision positioning with a resolution of 25 nm within a range of ±21 μm in HPM. Through the flexible switching and cooperation of the three drive modes, the platform can quickly approach the target at millimeter speed, further approach with micrometer step motion, and finally achieve nanometer precision positioning. Finally, the positioning platform was successfully applied to inspect semiconductor devices for defect inspection. This study explores a novel cross-scale driving method for piezoelectric positioning platforms, which provides a new approach for precision manipulation research related to semiconductor component inspection.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"284 ","pages":"Article 109765"},"PeriodicalIF":9.4000,"publicationDate":"2024-12-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324008063","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/1 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
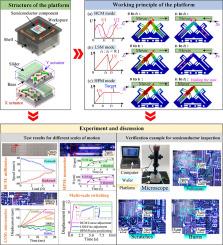
To address the challenge of achieving extensive travel and high precision in semiconductor inspection, this study proposes a novel 2-DOF cross-scale piezoelectric positioning platform. In semiconductor inspection, the platform utilizes elliptical, stick-slip, and direct-push drive modes to meet the motion requirements at millimeter, micrometer, and nanometer scales. By applying defined electrical signals to the piezoelectric units, the platform can achieve high-speed continuous mode (HCM) for the millimeter scale, low-speed stepping mode (LSM) for the micrometer scale, and high-precision positioning mode (HPM) for the nanometer scale. Theoretical analysis and simulations were performed to design the flexible stator of the platform, and its dynamic characteristics were analyzed. A prototype was fabricated, assembled, and experimentally tested to investigate the mechanical performance of the proposed platform. The results show that the prototype successfully realizes cross-scale motion in the three modes: achieving a maximum no-load speed of 62.47 mm/s in HCM, a low-speed stepping motion of 14.62 μm/s in LSM, and high-precision positioning with a resolution of 25 nm within a range of ±21 μm in HPM. Through the flexible switching and cooperation of the three drive modes, the platform can quickly approach the target at millimeter speed, further approach with micrometer step motion, and finally achieve nanometer precision positioning. Finally, the positioning platform was successfully applied to inspect semiconductor devices for defect inspection. This study explores a novel cross-scale driving method for piezoelectric positioning platforms, which provides a new approach for precision manipulation research related to semiconductor component inspection.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
