{"title":"NAN-DETR: noising multi-anchor makes DETR better for object detection.","authors":"Zixin Huang, Xuesong Tao, Xinyuan Liu","doi":"10.3389/fnbot.2024.1484088","DOIUrl":null,"url":null,"abstract":"<p><p>Object detection plays a crucial role in robotic vision, focusing on accurately identifying and localizing objects within images. However, many existing methods encounter limitations, particularly when it comes to effectively implementing a one-to-many matching strategy. To address these challenges, we propose NAN-DETR (Noising Multi-Anchor Detection Transformer), an innovative framework based on DETR (Detection Transformer). NAN-DETR introduces three key improvements to transformer-based object detection: a decoder-based multi-anchor strategy, a centralization noising mechanism, and the integration of Complete Intersection over Union (CIoU) loss. The multi-anchor strategy leverages multiple anchors per object, significantly enhancing detection accuracy by improving the one-to-many matching process. The centralization noising mechanism mitigates conflicts among anchors by injecting controlled noise into the detection boxes, thereby increasing the robustness of the model. Additionally, CIoU loss, which incorporates both aspect ratio and spatial distance in its calculations, results in more precise bounding box predictions compared to the conventional IoU loss. Although NAN-DETR may not drastically improve real-time processing capabilities, its exceptional performance positions it as a highly reliable solution for diverse object detection scenarios.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1484088"},"PeriodicalIF":2.8000,"publicationDate":"2024-10-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11513373/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1484088","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
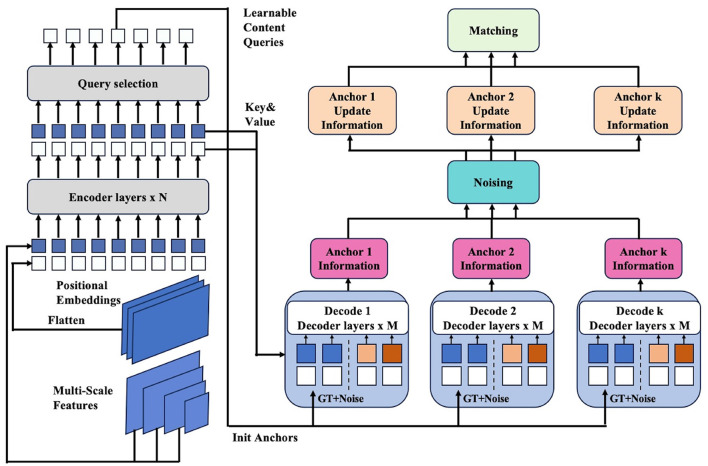
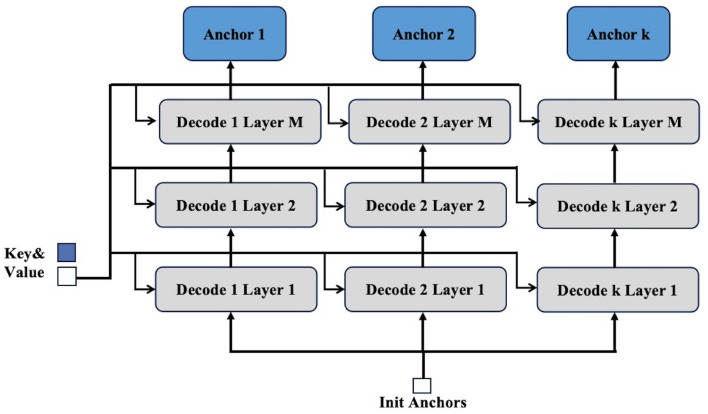
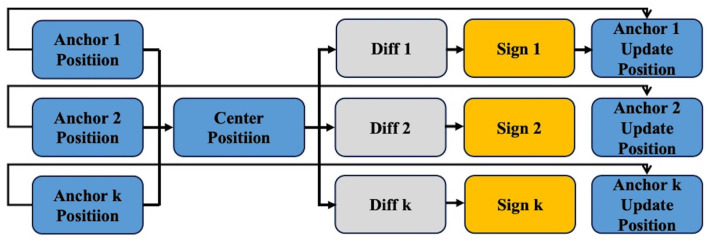
Object detection plays a crucial role in robotic vision, focusing on accurately identifying and localizing objects within images. However, many existing methods encounter limitations, particularly when it comes to effectively implementing a one-to-many matching strategy. To address these challenges, we propose NAN-DETR (Noising Multi-Anchor Detection Transformer), an innovative framework based on DETR (Detection Transformer). NAN-DETR introduces three key improvements to transformer-based object detection: a decoder-based multi-anchor strategy, a centralization noising mechanism, and the integration of Complete Intersection over Union (CIoU) loss. The multi-anchor strategy leverages multiple anchors per object, significantly enhancing detection accuracy by improving the one-to-many matching process. The centralization noising mechanism mitigates conflicts among anchors by injecting controlled noise into the detection boxes, thereby increasing the robustness of the model. Additionally, CIoU loss, which incorporates both aspect ratio and spatial distance in its calculations, results in more precise bounding box predictions compared to the conventional IoU loss. Although NAN-DETR may not drastically improve real-time processing capabilities, its exceptional performance positions it as a highly reliable solution for diverse object detection scenarios.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
