{"title":"Synthesis of a highly programmable multistable Kresling origami-inspired unit cell","authors":"Richard Rodriguez-Feliciano, K.W. Wang","doi":"10.1016/j.ijmecsci.2024.109768","DOIUrl":null,"url":null,"abstract":"<div><div>Multistable origami structures have been exploited for mechanical property tailoring, deployable robotic arms, wave propagation tuning and others, due to its ability to possess multiple stable states with distinct properties. Traditionally these structures are made by assembling bistable unit cells, which results in a significant increase in the size and weight of the system when larger number of stable states are required. Recently, researchers have uncovered a third stable state in the Kresling origami pattern. Although this is an advancement over the bistable unit cell, there is an unexplored opportunity for more systematically expanding the design space of Kresling unit cells to possess many more stable configurations (>>2) and enhance its programmable multistability. In this research, we seek to develop a methodology for the design of a Kresling origami-inspired unit cell that can be easily programmed to achieve up to 10 stable configurations, with the potential to achieve even more. We exploit the rich kinematics of the Kresling origami-inspired unit cell, that arise from its coupled translational and rotational deployment, and propose the strategic integration of tensile elements to realize multiple stable states. Analytically, we study the unstretched length values (defined to be the precise length between the string “slacked” and “tensioned” configurations) of the strings that yield the distinct number of stable states. We present the potential energy profiles with its corresponding force-displacement plots for the bistable, tristable, quadstable, pentastable and decastable unit cells. Moreover, we show that by simply adjusting the unstretched length of the strings we can program and tune the number of stable states of the unit cell. Tristable and pentastable unit cell prototypes are designed and experimentally tested to validate the proposed methodology. Lastly, a study is performed on the mechanical property tailoring capabilities of two unit cells assembled in series. The results show that the decastable unit cell assembly can achieve up to 55 discrete values of equivalent stiffness, while the bistable one can only achieve 3. For the bistable unit cell assembly to match this number, it will require 54 unit cells in series, which will significantly increase the size and weight of the structural system. These findings show that the modular structure will have more programmable capabilities, while maintaining its size and weight at a minimum, as the number of stable states per unit cell is increased.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"284 ","pages":"Article 109768"},"PeriodicalIF":9.4000,"publicationDate":"2024-10-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324008099","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
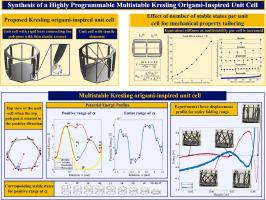
Multistable origami structures have been exploited for mechanical property tailoring, deployable robotic arms, wave propagation tuning and others, due to its ability to possess multiple stable states with distinct properties. Traditionally these structures are made by assembling bistable unit cells, which results in a significant increase in the size and weight of the system when larger number of stable states are required. Recently, researchers have uncovered a third stable state in the Kresling origami pattern. Although this is an advancement over the bistable unit cell, there is an unexplored opportunity for more systematically expanding the design space of Kresling unit cells to possess many more stable configurations (>>2) and enhance its programmable multistability. In this research, we seek to develop a methodology for the design of a Kresling origami-inspired unit cell that can be easily programmed to achieve up to 10 stable configurations, with the potential to achieve even more. We exploit the rich kinematics of the Kresling origami-inspired unit cell, that arise from its coupled translational and rotational deployment, and propose the strategic integration of tensile elements to realize multiple stable states. Analytically, we study the unstretched length values (defined to be the precise length between the string “slacked” and “tensioned” configurations) of the strings that yield the distinct number of stable states. We present the potential energy profiles with its corresponding force-displacement plots for the bistable, tristable, quadstable, pentastable and decastable unit cells. Moreover, we show that by simply adjusting the unstretched length of the strings we can program and tune the number of stable states of the unit cell. Tristable and pentastable unit cell prototypes are designed and experimentally tested to validate the proposed methodology. Lastly, a study is performed on the mechanical property tailoring capabilities of two unit cells assembled in series. The results show that the decastable unit cell assembly can achieve up to 55 discrete values of equivalent stiffness, while the bistable one can only achieve 3. For the bistable unit cell assembly to match this number, it will require 54 unit cells in series, which will significantly increase the size and weight of the structural system. These findings show that the modular structure will have more programmable capabilities, while maintaining its size and weight at a minimum, as the number of stable states per unit cell is increased.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
