Min Wan, Chuan-Jing Shen, Xiang Qu, Yun Yang, Wei-Hong Zhang
{"title":"Chatter stability of the robotic milling process involving the influences of low frequency vibrations in three directions","authors":"Min Wan, Chuan-Jing Shen, Xiang Qu, Yun Yang, Wei-Hong Zhang","doi":"10.1016/j.ymssp.2024.112014","DOIUrl":null,"url":null,"abstract":"<div><div>Existing regenerative chatter models orienting for the robotic milling processes only considered the structure mode-induced low frequency vibrations in the <span><math><mrow><mi>X</mi><mi>Y</mi></mrow></math></span> plane. This article experimentally reports that obvious <span><math><mi>Z</mi></math></span>-directional low frequency vibrations exist in robotic milling processes with weakly rigid postures, and they can cause multi-cutting phenomenon. Just because of this phenomenon, obvious axial tool-workpiece separation and over-cut phenomena are experimentally observed. This confirms that besides the low frequency vibrations in the <span><math><mrow><mi>X</mi><mi>Y</mi></mrow></math></span> plane, those in relation to the <span><math><mi>Z</mi></math></span> direction also greatly affect the stability of the robotic milling process. Hence, a comprehensive dynamic model is systematically established to couple the influences of the low frequency vibrations in relation to both <span><math><mrow><mi>X</mi><mi>Y</mi></mrow></math></span> plane and <span><math><mi>Z</mi></math></span> direction of the robotic milling process. The low frequency vibrations in relation to the three directions are quantitatively characterized, and then combined to analyze the radial and axial tool-workpiece separations. For the convenience of study, the tool-workpiece engagement region along the axial depth of cut is divided into a static cutting region and a dynamic cutting region. It is theoretically clarified that the axial over-cut phenomenon (AOCP) leads to an obvious stepped shape of the dynamic cutting region. The multiple delay items, which are redistributed by the complex tool-workpiece engagement states, are derived and then integrated to establish the dynamic governing equation. Subsequently, the principle for obtaining stability lobe diagrams (SLDs) of the robotic milling processes is formulated. A series of robotic milling experiments under different weakly rigid postures confirm that the proposed model can give good prediction accuracy of SLDs.</div></div>","PeriodicalId":51124,"journal":{"name":"Mechanical Systems and Signal Processing","volume":"224 ","pages":"Article 112014"},"PeriodicalIF":8.9000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mechanical Systems and Signal Processing","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0888327024009129","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/20 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
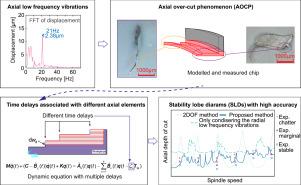
Existing regenerative chatter models orienting for the robotic milling processes only considered the structure mode-induced low frequency vibrations in the plane. This article experimentally reports that obvious -directional low frequency vibrations exist in robotic milling processes with weakly rigid postures, and they can cause multi-cutting phenomenon. Just because of this phenomenon, obvious axial tool-workpiece separation and over-cut phenomena are experimentally observed. This confirms that besides the low frequency vibrations in the plane, those in relation to the direction also greatly affect the stability of the robotic milling process. Hence, a comprehensive dynamic model is systematically established to couple the influences of the low frequency vibrations in relation to both plane and direction of the robotic milling process. The low frequency vibrations in relation to the three directions are quantitatively characterized, and then combined to analyze the radial and axial tool-workpiece separations. For the convenience of study, the tool-workpiece engagement region along the axial depth of cut is divided into a static cutting region and a dynamic cutting region. It is theoretically clarified that the axial over-cut phenomenon (AOCP) leads to an obvious stepped shape of the dynamic cutting region. The multiple delay items, which are redistributed by the complex tool-workpiece engagement states, are derived and then integrated to establish the dynamic governing equation. Subsequently, the principle for obtaining stability lobe diagrams (SLDs) of the robotic milling processes is formulated. A series of robotic milling experiments under different weakly rigid postures confirm that the proposed model can give good prediction accuracy of SLDs.
现有的面向机器人铣削过程的再生颤振模型只考虑了结构模式在 XY 平面上引起的低频振动。本文的实验报告表明,在刚性较弱的机器人铣削过程中,存在明显的 Z 方向低频振动,并会引起多切现象。正因为这种现象,实验观察到了明显的轴向刀具-工件分离和过切现象。这证实了除了 XY 平面的低频振动外,与 Z 方向相关的振动也会极大地影响机器人铣削过程的稳定性。因此,我们系统地建立了一个综合动态模型,以耦合机器人铣削过程中与 XY 平面和 Z 方向有关的低频振动的影响。对与三个方向相关的低频振动进行定量表征,然后结合分析刀具与工件的径向和轴向分离。为便于研究,将刀具与工件沿轴向切深的啮合区域划分为静态切削区域和动态切削区域。理论上,轴向过切现象(AOCP)会导致动态切削区域出现明显的阶梯形状。推导出复杂的刀具与工件啮合状态重新分布的多个延迟项,并对其进行积分,从而建立了动态调控方程。随后,提出了获得机器人铣削过程稳定叶图(SLD)的原理。在不同的弱刚性姿态下进行的一系列机器人铣削实验证实,所提出的模型能提供良好的 SLD 预测精度。
期刊介绍:
Journal Name: Mechanical Systems and Signal Processing (MSSP)
Interdisciplinary Focus:
Mechanical, Aerospace, and Civil Engineering
Purpose:Reporting scientific advancements of the highest quality
Arising from new techniques in sensing, instrumentation, signal processing, modelling, and control of dynamic systems



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
