Prashanth Chivkula, Colin Rodwell, Phanindra Tallapragada
{"title":"Hopping potential wells and gait switching in a fish-like robot with a bistable tail","authors":"Prashanth Chivkula, Colin Rodwell, Phanindra Tallapragada","doi":"10.1016/j.eml.2024.102239","DOIUrl":null,"url":null,"abstract":"<div><div>Fish outperform current underwater robots in speed, agility, and efficiency of locomotion, in part due to their flexible appendages that are capable of rich combinations of modes of motion. In fish-like robots, actuating many different modes of oscillation of tails or fins can become a challenge. This paper presents a highly underactuated (with a single actuator) fish-like robot with a bistable tail that features a double-well elastic potential. Oscillations of such a tail depend on the frequency and amplitude of excitation, and tuning the frequency–amplitude can produce controllable oscillations in different modes leading to different gaits of the robot. This robot design is inspired by recent work on underactuated flexible swimming robots driven by a single rotor. The oscillations of the rotor can propel and steer the robot, but saturation of the rotor makes performing long turns challenging. This paper demonstrates that by adding geometric bistability to the flexible tail, turns can be performed by controllably exciting single-well oscillations in the tail, while exciting double-well oscillations of the tail produces average straight-line motion. The findings of this paper go beyond the application to a narrow class of fish-like robots. More broadly we have demonstrated the use of periodic excitation to produce bistable response that generate different gaits including a steering gait. The mechanics demonstrated here show the feasibility of applications to other mobile soft robots.</div></div>","PeriodicalId":56247,"journal":{"name":"Extreme Mechanics Letters","volume":"72 ","pages":"Article 102239"},"PeriodicalIF":4.5000,"publicationDate":"2024-10-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Extreme Mechanics Letters","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2352431624001196","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
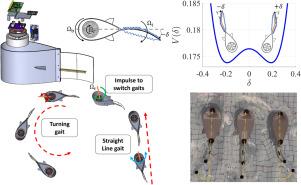
Fish outperform current underwater robots in speed, agility, and efficiency of locomotion, in part due to their flexible appendages that are capable of rich combinations of modes of motion. In fish-like robots, actuating many different modes of oscillation of tails or fins can become a challenge. This paper presents a highly underactuated (with a single actuator) fish-like robot with a bistable tail that features a double-well elastic potential. Oscillations of such a tail depend on the frequency and amplitude of excitation, and tuning the frequency–amplitude can produce controllable oscillations in different modes leading to different gaits of the robot. This robot design is inspired by recent work on underactuated flexible swimming robots driven by a single rotor. The oscillations of the rotor can propel and steer the robot, but saturation of the rotor makes performing long turns challenging. This paper demonstrates that by adding geometric bistability to the flexible tail, turns can be performed by controllably exciting single-well oscillations in the tail, while exciting double-well oscillations of the tail produces average straight-line motion. The findings of this paper go beyond the application to a narrow class of fish-like robots. More broadly we have demonstrated the use of periodic excitation to produce bistable response that generate different gaits including a steering gait. The mechanics demonstrated here show the feasibility of applications to other mobile soft robots.
期刊介绍:
Extreme Mechanics Letters (EML) enables rapid communication of research that highlights the role of mechanics in multi-disciplinary areas across materials science, physics, chemistry, biology, medicine and engineering. Emphasis is on the impact, depth and originality of new concepts, methods and observations at the forefront of applied sciences.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
