Chunpeng Zhao , Honghu Xiao , Qiyong Cao , Yufeng Ge , Yuneng Li , Yu Wang , Gang Zhu , Xinbao Wu
{"title":"Innovative development of robot reduction system in geriatric pelvic fractures: A single-center case series in Beijing, China","authors":"Chunpeng Zhao , Honghu Xiao , Qiyong Cao , Yufeng Ge , Yuneng Li , Yu Wang , Gang Zhu , Xinbao Wu","doi":"10.1016/j.jot.2024.08.023","DOIUrl":null,"url":null,"abstract":"<div><div>Displaced fragility fractures of the pelvis (FFP) pose significant challenges in orthopaedic trauma, owing to patient comorbidities, deteriorating bone quality, and surgical complexities. Despite technological advancements, no robotic methods have been documented for displaced FFP management. To address this, we introduced an advanced robot-assisted fracture reduction system, comprising a tracking device, path planning software, and robotic arms. This study evaluated fifteen consecutive patients with displaced FFP (average age 80.4 ± 9.1 years), who underwent robot-assisted reduction and internal fixation (RARIF) between January 2022 and May 2023. All were categorized as Rommens FFP type III, with a median time of 6 days (range 4–11) from injury to surgery. Operative times averaged 165 ± 44 min, with median blood loss of 50 mL. Postoperative radiographs showed all patients achieved excellent or good reductions as per Matta criteria, marking a 100 % success rate. A 6-month follow-up revealed an average modified Majeed score of 81.4, with 85.7 % of patients rated excellent or good. All fractures healed without complications. Leveraging our intelligent system, RARIF proves to be a safe and effective approach for displaced FFP, facilitating postoperative pain alleviation and early mobilization despite compromised health and bone conditions. This approach may revolutionize the management of FFP in an increasingly aging population, signaling a significant shift in therapeutic strategies.</div><div>Translational Potential of this Article: Elderly patients with displaced FFP often present complex surgical challenges due to comorbidities and poor bone quality, complicating reduction procedures and often leading to ineffective fixation. Addressing these challenges, we have developed an innovative robot-assisted fracture reduction system, offering a practical alternative to conventional methods. This system optimizes the applied force and direction during the reduction process, thereby reducing the needs for manual and repetitive attempts. Our report, detailing the successful implementation of this technique in 15 FFP cases, signifies a considerable leap forward in the field of orthopaedic surgery. This technique notably benefits the elderly population, a group traditionally marginalized in receiving care for complex orthopedic conditions.</div></div>","PeriodicalId":16636,"journal":{"name":"Journal of Orthopaedic Translation","volume":"49 ","pages":"Pages 283-288"},"PeriodicalIF":5.9000,"publicationDate":"2024-11-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Orthopaedic Translation","FirstCategoryId":"3","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2214031X24001104","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/30 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
引用次数: 0
Abstract
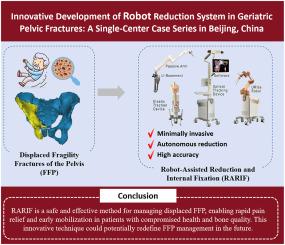
Displaced fragility fractures of the pelvis (FFP) pose significant challenges in orthopaedic trauma, owing to patient comorbidities, deteriorating bone quality, and surgical complexities. Despite technological advancements, no robotic methods have been documented for displaced FFP management. To address this, we introduced an advanced robot-assisted fracture reduction system, comprising a tracking device, path planning software, and robotic arms. This study evaluated fifteen consecutive patients with displaced FFP (average age 80.4 ± 9.1 years), who underwent robot-assisted reduction and internal fixation (RARIF) between January 2022 and May 2023. All were categorized as Rommens FFP type III, with a median time of 6 days (range 4–11) from injury to surgery. Operative times averaged 165 ± 44 min, with median blood loss of 50 mL. Postoperative radiographs showed all patients achieved excellent or good reductions as per Matta criteria, marking a 100 % success rate. A 6-month follow-up revealed an average modified Majeed score of 81.4, with 85.7 % of patients rated excellent or good. All fractures healed without complications. Leveraging our intelligent system, RARIF proves to be a safe and effective approach for displaced FFP, facilitating postoperative pain alleviation and early mobilization despite compromised health and bone conditions. This approach may revolutionize the management of FFP in an increasingly aging population, signaling a significant shift in therapeutic strategies.
Translational Potential of this Article: Elderly patients with displaced FFP often present complex surgical challenges due to comorbidities and poor bone quality, complicating reduction procedures and often leading to ineffective fixation. Addressing these challenges, we have developed an innovative robot-assisted fracture reduction system, offering a practical alternative to conventional methods. This system optimizes the applied force and direction during the reduction process, thereby reducing the needs for manual and repetitive attempts. Our report, detailing the successful implementation of this technique in 15 FFP cases, signifies a considerable leap forward in the field of orthopaedic surgery. This technique notably benefits the elderly population, a group traditionally marginalized in receiving care for complex orthopedic conditions.
期刊介绍:
The Journal of Orthopaedic Translation (JOT) is the official peer-reviewed, open access journal of the Chinese Speaking Orthopaedic Society (CSOS) and the International Chinese Musculoskeletal Research Society (ICMRS). It is published quarterly, in January, April, July and October, by Elsevier.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
