{"title":"The docking control system of an autonomous underwater vehicle combining intelligent object recognition and deep reinforcement learning","authors":"Chao-Ming Yu, Yu-Hsien Lin","doi":"10.1016/j.engappai.2024.109565","DOIUrl":null,"url":null,"abstract":"<div><div>This study develops a visual-based docking system (VDS) for an autonomous underwater vehicle (AUV), significantly enhancing docking performance by integrating intelligent object recognition and deep reinforcement learning (DRL). The system overcomes traditional navigation limitations in complex and unpredictable environments by using a variable information dock (VID) for precise multi-sensor docking recognition in the AUV. Employing image-based visual servoing (IBVS) technology, the VDS efficiently converts 2D visual data into accurate 3D motion control commands. It integrates the YOLO (short for You Only Look Once) algorithm for object recognition and the deep deterministic policy gradient (DDPG) algorithm, improving continuous motion control, docking accuracy, and adaptability. Experimental validation at the National Cheng Kung University towing tank demonstrates that the VDS enhances control stability and operational reliability, reducing the mean absolute error (MAE) in depth control by 42.03% and pitch control by 98.02% compared to the previous method. These results confirm the VDS's reliability and its potential for transforming AUV docking.</div></div>","PeriodicalId":50523,"journal":{"name":"Engineering Applications of Artificial Intelligence","volume":"139 ","pages":"Article 109565"},"PeriodicalIF":8.0000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Applications of Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0952197624017238","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/1 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
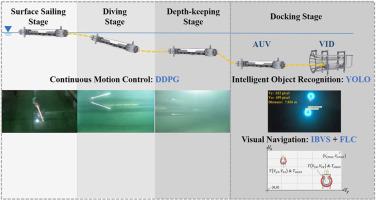
This study develops a visual-based docking system (VDS) for an autonomous underwater vehicle (AUV), significantly enhancing docking performance by integrating intelligent object recognition and deep reinforcement learning (DRL). The system overcomes traditional navigation limitations in complex and unpredictable environments by using a variable information dock (VID) for precise multi-sensor docking recognition in the AUV. Employing image-based visual servoing (IBVS) technology, the VDS efficiently converts 2D visual data into accurate 3D motion control commands. It integrates the YOLO (short for You Only Look Once) algorithm for object recognition and the deep deterministic policy gradient (DDPG) algorithm, improving continuous motion control, docking accuracy, and adaptability. Experimental validation at the National Cheng Kung University towing tank demonstrates that the VDS enhances control stability and operational reliability, reducing the mean absolute error (MAE) in depth control by 42.03% and pitch control by 98.02% compared to the previous method. These results confirm the VDS's reliability and its potential for transforming AUV docking.
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
