Alexandra Scheibert, Mark Preuss, Jonas Osburg, Floris Ernst, Markus Kleemann, Marco Horn
{"title":"Robotic Assisted Ultrasound-Guided Endovascular Stent Implantation in a Vascular Model","authors":"Alexandra Scheibert, Mark Preuss, Jonas Osburg, Floris Ernst, Markus Kleemann, Marco Horn","doi":"10.1002/rcs.70005","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Endovascular procedures are the preferred method for treating peripheral arterial disease. However, limited imaging options during these procedures, such as X-rays and contrast media, expose patients and healthcare professionals to potentially harmful radiation. This study introduces a robotic ultrasound system (RUSS) for navigating endovascular procedures in order to reduce radiation and provide additional information.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>The RUSS comprises a seven-degree-of-freedom robotic arm that navigates an ultrasound transducer across a specific region of interest. The system is controlled by a self-programed software designed to navigate the robotic arm in a methodical and reproducible manner using a foot switch.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>An endovascular surgeon investigated the guidance and visibility of various guidewires and successfully implanted three stents in a vascular leg phantom using the RUSS without further radiation exposure.</p>\n </section>\n \n <section>\n \n <h3> Conclusions</h3>\n \n <p>The innovative set-up has several potential applications, including radiation-free endovascular procedures as well as health screening and diagnostic support in vascular medicine.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 6","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2024-11-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.70005","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.70005","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background
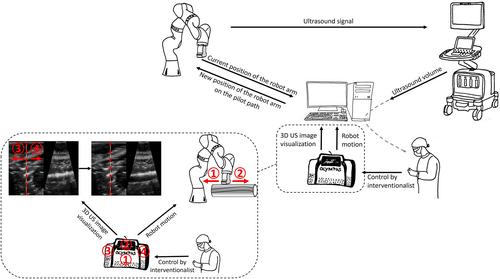
Endovascular procedures are the preferred method for treating peripheral arterial disease. However, limited imaging options during these procedures, such as X-rays and contrast media, expose patients and healthcare professionals to potentially harmful radiation. This study introduces a robotic ultrasound system (RUSS) for navigating endovascular procedures in order to reduce radiation and provide additional information.
Methods
The RUSS comprises a seven-degree-of-freedom robotic arm that navigates an ultrasound transducer across a specific region of interest. The system is controlled by a self-programed software designed to navigate the robotic arm in a methodical and reproducible manner using a foot switch.
Results
An endovascular surgeon investigated the guidance and visibility of various guidewires and successfully implanted three stents in a vascular leg phantom using the RUSS without further radiation exposure.
Conclusions
The innovative set-up has several potential applications, including radiation-free endovascular procedures as well as health screening and diagnostic support in vascular medicine.
背景:血管内手术是治疗外周动脉疾病的首选方法。然而,在这些手术过程中,有限的成像选择(如 X 射线和造影剂)会使患者和医护人员暴露于潜在的有害辐射中。本研究介绍了一种用于血管内手术导航的机器人超声系统(RUSS),以减少辐射并提供更多信息:RUSS由一个七自由度的机械臂组成,它能引导超声波传感器穿过特定的感兴趣区域。该系统由一个自编程软件控制,该软件旨在通过脚踏开关有条不紊地以可重复的方式导航机械臂:结果:一名血管内科医生研究了各种导丝的引导和可视性,并使用 RUSS 成功地在一个血管腿部模型中植入了三个支架,而没有进一步的辐射暴露:该创新装置具有多种潜在应用,包括无辐射血管内手术以及血管医学中的健康检查和诊断支持。
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
