Luciano Afferrante, Guido Violano, Giuseppe P. Demelio
{"title":"Sliding Viscoelastic Contacts: The Role of Adhesion, Boundary Conditions, and Finite Geometry","authors":"Luciano Afferrante, Guido Violano, Giuseppe P. Demelio","doi":"10.1007/s11249-024-01940-7","DOIUrl":null,"url":null,"abstract":"<div><p>In this study, we investigate the tangential sliding of a rigid Hertzian indenter on a viscoelastic substrate, a problem of practical interest due to the crucial role that sliding contacts play in various applications involving soft materials. A finite element model is developed, where the substrate is modelled using a standard linear viscoelastic model with one relaxation time, and adhesion is incorporated using a Lennard–Jones potential law. We propose an innovative approach to model tangential sliding without imposing any lateral displacement, thereby enhancing the numerical efficiency. Our goal is to investigate the roles of adhesive regimes, boundary conditions (displacement and force-controlled conditions), and finite thickness of the substrate. Results indicate significant differences in the system’s behaviour depending on the boundary conditions and adhesion regime. In the short-range adhesion regime, the contact length <span>\\(\\mathcal {L}\\)</span> initially increases with sliding speed before decreasing, showing a maximum at intermediate speeds. This behaviour is consistent with experimental observations in rubber-like materials and is a result of the transition from small-scale to large-scale viscous dissipation regimes. For long-range adhesion, this behaviour disappears and <span>\\(\\mathcal {L}\\)</span> decreases monotonically with sliding speed. The viscoelastic friction coefficient <span>\\(\\mu\\)</span> exhibits a bell-shaped curve with its maximum value influenced by the applied load, both in long-range and short-range adhesion. However, under displacement control, <span>\\(\\mu\\)</span> can be unbounded near a specific sliding speed, correlating with the normal force crossing zero. Finally, a transition towards a long-range adhesive behaviour is observed when reducing the thickness <i>t</i> of the viscoelastic layer, which is assumed to be bonded to a rigid foundation. Moreover, the friction coefficient reduces when <i>t</i> tends to zero. These findings provide insights into the viscoelastic and adhesive interactions during sliding, highlighting the critical influence of boundary conditions on contact mechanics.</p></div>","PeriodicalId":806,"journal":{"name":"Tribology Letters","volume":"73 1","pages":""},"PeriodicalIF":3.3000,"publicationDate":"2024-11-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Tribology Letters","FirstCategoryId":"5","ListUrlMain":"https://link.springer.com/article/10.1007/s11249-024-01940-7","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, CHEMICAL","Score":null,"Total":0}
引用次数: 0
Abstract
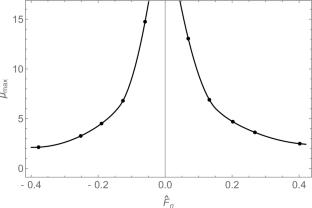
In this study, we investigate the tangential sliding of a rigid Hertzian indenter on a viscoelastic substrate, a problem of practical interest due to the crucial role that sliding contacts play in various applications involving soft materials. A finite element model is developed, where the substrate is modelled using a standard linear viscoelastic model with one relaxation time, and adhesion is incorporated using a Lennard–Jones potential law. We propose an innovative approach to model tangential sliding without imposing any lateral displacement, thereby enhancing the numerical efficiency. Our goal is to investigate the roles of adhesive regimes, boundary conditions (displacement and force-controlled conditions), and finite thickness of the substrate. Results indicate significant differences in the system’s behaviour depending on the boundary conditions and adhesion regime. In the short-range adhesion regime, the contact length \(\mathcal {L}\) initially increases with sliding speed before decreasing, showing a maximum at intermediate speeds. This behaviour is consistent with experimental observations in rubber-like materials and is a result of the transition from small-scale to large-scale viscous dissipation regimes. For long-range adhesion, this behaviour disappears and \(\mathcal {L}\) decreases monotonically with sliding speed. The viscoelastic friction coefficient \(\mu\) exhibits a bell-shaped curve with its maximum value influenced by the applied load, both in long-range and short-range adhesion. However, under displacement control, \(\mu\) can be unbounded near a specific sliding speed, correlating with the normal force crossing zero. Finally, a transition towards a long-range adhesive behaviour is observed when reducing the thickness t of the viscoelastic layer, which is assumed to be bonded to a rigid foundation. Moreover, the friction coefficient reduces when t tends to zero. These findings provide insights into the viscoelastic and adhesive interactions during sliding, highlighting the critical influence of boundary conditions on contact mechanics.
在本研究中,我们研究了刚性赫兹压头在粘弹性基体上的切向滑动问题,由于滑动接触在涉及软材料的各种应用中起着至关重要的作用,因此这是一个具有实际意义的问题。我们建立了一个有限元模型,其中基体采用标准线性粘弹性模型,有一个弛豫时间,粘附力采用 Lennard-Jones 势律。我们提出了一种创新方法来模拟切向滑动,而不施加任何横向位移,从而提高了数值效率。我们的目标是研究粘附状态、边界条件(位移和力控制条件)以及基底有限厚度的作用。结果表明,根据边界条件和粘附机制的不同,系统的行为也存在明显差异。在短程粘附机制中,接触长度最初随着滑动速度的增加而增加,然后减小,在中速时达到最大值。这种行为与类橡胶材料的实验观察结果一致,是小尺度粘滞耗散机制向大尺度粘滞耗散机制过渡的结果。对于长程粘附,这种行为消失了,并且 \(\mathcal {L}\) 随着滑动速度单调地减小。粘弹性摩擦系数(\(\mu\))呈现出钟形曲线,其最大值受外加载荷的影响,在长程和短程粘附中都是如此。然而,在位移控制下,\(\mu\)在特定滑动速度附近可能是无约束的,这与法向力过零有关。最后,当减小粘弹性层的厚度 t 时,可以观察到向长程粘附行为的过渡,粘弹性层被假定粘结在刚性地基上。此外,当 t 趋于零时,摩擦系数也会降低。这些发现深入揭示了滑动过程中粘弹性和粘性的相互作用,突出了边界条件对接触力学的重要影响。
期刊介绍:
Tribology Letters is devoted to the development of the science of tribology and its applications, particularly focusing on publishing high-quality papers at the forefront of tribological science and that address the fundamentals of friction, lubrication, wear, or adhesion. The journal facilitates communication and exchange of seminal ideas among thousands of practitioners who are engaged worldwide in the pursuit of tribology-based science and technology.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
