Ruifeng Wang , Liang Wang , Botao Jia , Shuchao Deng , Zhenhua Zhao
{"title":"Design and modelling of a novel single-phase-driven piezoelectric actuator","authors":"Ruifeng Wang , Liang Wang , Botao Jia , Shuchao Deng , Zhenhua Zhao","doi":"10.1016/j.ijmecsci.2024.109819","DOIUrl":null,"url":null,"abstract":"<div><div>Sandwich single-phase-driven piezoelectric actuators have attracted increasing interest owing to their simple control circuits, flexible designs, and high output forces. However, there are challenges in constructing a standing-wave driving mode for sandwich single-phase-driven rotary piezoelectric actuators and in achieving bidirectional driving as well as an integrated structural and functional design, which limit their applications. To address these issues and meet the demands of the joint drive, a novel sandwich single-phase-driven rotary piezoelectric actuator is proposed in this study. The actuator stator has a beam-ring configuration, with dual rotors effectively integrated with a preload adjustment mechanism to solve the contact-warping problem of the cantilever joint and achieve an integrated structural and functional design of the joint drive. The standing-wave rotation drive and steering functions are realized through the special design of modes and unique arrangement of the upper and lower driving teeth. To reveal the dynamic characteristics of the stator, a universal electromechanical coupling dynamic model for the torsional-bending composite vibration of sandwich piezoelectric actuators was developed for the first time using the transfer matrix method, and the correctness of the dynamic model was verified using a prototype of the proposed stator. Finally, the structural design feasibility of the proposed piezoelectric actuator was verified through performance evaluation experiments on the actuator prototype. The proposed sandwich single-phase-driven rotary piezoelectric actuator lays the technical and theoretical foundations for achieving simple, fast, efficient, and precise driving and control of robotic joints.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"286 ","pages":"Article 109819"},"PeriodicalIF":9.4000,"publicationDate":"2025-01-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324008609","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/19 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
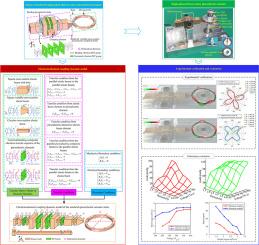
Sandwich single-phase-driven piezoelectric actuators have attracted increasing interest owing to their simple control circuits, flexible designs, and high output forces. However, there are challenges in constructing a standing-wave driving mode for sandwich single-phase-driven rotary piezoelectric actuators and in achieving bidirectional driving as well as an integrated structural and functional design, which limit their applications. To address these issues and meet the demands of the joint drive, a novel sandwich single-phase-driven rotary piezoelectric actuator is proposed in this study. The actuator stator has a beam-ring configuration, with dual rotors effectively integrated with a preload adjustment mechanism to solve the contact-warping problem of the cantilever joint and achieve an integrated structural and functional design of the joint drive. The standing-wave rotation drive and steering functions are realized through the special design of modes and unique arrangement of the upper and lower driving teeth. To reveal the dynamic characteristics of the stator, a universal electromechanical coupling dynamic model for the torsional-bending composite vibration of sandwich piezoelectric actuators was developed for the first time using the transfer matrix method, and the correctness of the dynamic model was verified using a prototype of the proposed stator. Finally, the structural design feasibility of the proposed piezoelectric actuator was verified through performance evaluation experiments on the actuator prototype. The proposed sandwich single-phase-driven rotary piezoelectric actuator lays the technical and theoretical foundations for achieving simple, fast, efficient, and precise driving and control of robotic joints.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
