{"title":"The nexus of intelligent transportation: A lightweight Bi-input fusion detection model for autonomous-rail rapid transit","authors":"Hongjie Tang , Jirui Wang , Jiaoyi Wu , Yanni Zhao , Jiangfan Chen , Fujian Liang , Zutao Zhang","doi":"10.1016/j.engappai.2024.109705","DOIUrl":null,"url":null,"abstract":"<div><div>Autonomous-rail Rapid Transit (ART) possesses various advantages in intelligent transportation, but it does not effectively recognize road conditions caused solely by deploying single-modal cameras. In this paper, a lightweight fusion-based object detection neural network was designed with multi-modal sensors for the ART. Firstly, the Light Detection and Ranging (LiDAR) applied additional encoding and preprocessing to the point cloud. Secondly, a backbone and a detection head of the network structure were proposed through re-parameterization and pruning techniques. Furthermore, a fusion module was designed with a selective soft attention mechanism to fuse the extracted features. The proposed model was tested on the open autonomous driving dataset; it achieved a 7.38% improvement in mean average precision (mAP) compared to the original you only look once (YOLO) as well as other state-of-the-art (SOTA) models. Finally, practical experiments were conducted in the maintenance center of ART to simulate the operational scenarios and validate the feasibility of the proposed method in this study. By fully utilizing the information in different modalities and addressing the limitations of single-modal recognition, efforts were made to improve the robustness of road object detection for ART under different road conditions. Consequently, our method provides effective solutions which benefit intelligent transportation with advanced algorithms and strategies.</div></div>","PeriodicalId":50523,"journal":{"name":"Engineering Applications of Artificial Intelligence","volume":"139 ","pages":"Article 109705"},"PeriodicalIF":8.0000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Applications of Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0952197624018633","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/22 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
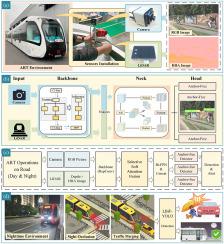
Autonomous-rail Rapid Transit (ART) possesses various advantages in intelligent transportation, but it does not effectively recognize road conditions caused solely by deploying single-modal cameras. In this paper, a lightweight fusion-based object detection neural network was designed with multi-modal sensors for the ART. Firstly, the Light Detection and Ranging (LiDAR) applied additional encoding and preprocessing to the point cloud. Secondly, a backbone and a detection head of the network structure were proposed through re-parameterization and pruning techniques. Furthermore, a fusion module was designed with a selective soft attention mechanism to fuse the extracted features. The proposed model was tested on the open autonomous driving dataset; it achieved a 7.38% improvement in mean average precision (mAP) compared to the original you only look once (YOLO) as well as other state-of-the-art (SOTA) models. Finally, practical experiments were conducted in the maintenance center of ART to simulate the operational scenarios and validate the feasibility of the proposed method in this study. By fully utilizing the information in different modalities and addressing the limitations of single-modal recognition, efforts were made to improve the robustness of road object detection for ART under different road conditions. Consequently, our method provides effective solutions which benefit intelligent transportation with advanced algorithms and strategies.
自主轨道捷运(ART)在智能交通领域具有多种优势,但仅靠部署单模态摄像头并不能有效识别路况。本文设计了一种基于多模态传感器融合的轻量级物体检测神经网络,用于自动轨道捷运。首先,光探测和测距(LiDAR)对点云进行了额外的编码和预处理。其次,通过重新参数化和剪枝技术,提出了网络结构的主干和检测头。此外,还设计了一个融合模块,采用选择性软关注机制来融合提取的特征。所提出的模型在开放的自动驾驶数据集上进行了测试;与原始的 "你只看一次"(YOLO)模型以及其他最先进的(SOTA)模型相比,该模型的平均精度(mAP)提高了 7.38%。最后,在 ART 维护中心进行了实际实验,模拟运行场景,验证了本研究提出的方法的可行性。通过充分利用不同模态的信息,解决单一模态识别的局限性,努力提高 ART 在不同路况下道路物体检测的鲁棒性。因此,我们的方法提供了有效的解决方案,通过先进的算法和策略造福于智能交通。
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
