Yuhang Ming , Xingrui Yang , Weihan Wang , Zheng Chen , Jinglun Feng , Yifan Xing , Guofeng Zhang
{"title":"Benchmarking neural radiance fields for autonomous robots: An overview","authors":"Yuhang Ming , Xingrui Yang , Weihan Wang , Zheng Chen , Jinglun Feng , Yifan Xing , Guofeng Zhang","doi":"10.1016/j.engappai.2024.109685","DOIUrl":null,"url":null,"abstract":"<div><div>Neural Radiance Field (NeRF) has emerged as a powerful paradigm for scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. However, few survey has discussed such a potential. To fill this gap, we have collected over 200 papers since the publication of original NeRF in 2020 and present a thorough analysis of how NeRF can be used to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3-dimensional reconstruction, segmentation, pose estimation, simultaneous localization and mapping, navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, comparing their reported performance, and providing insights into their strengths and limitations. Moreover, we target the existing challenges of applying NeRF in autonomous robots, including real-time processing, sparse input views, and explore promising avenues for future research and development in this domain. We especially discuss potential of integrating advanced deep learning techniques like 3-dimensional Gaussian splatting, large language models, and generative artificial intelligence. This survey serves as a roadmap for researchers seeking to leverage NeRF to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.</div></div>","PeriodicalId":50523,"journal":{"name":"Engineering Applications of Artificial Intelligence","volume":"140 ","pages":"Article 109685"},"PeriodicalIF":8.0000,"publicationDate":"2025-01-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Applications of Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0952197624018438","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/29 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
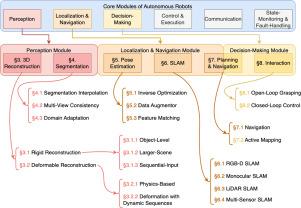
Neural Radiance Field (NeRF) has emerged as a powerful paradigm for scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. However, few survey has discussed such a potential. To fill this gap, we have collected over 200 papers since the publication of original NeRF in 2020 and present a thorough analysis of how NeRF can be used to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3-dimensional reconstruction, segmentation, pose estimation, simultaneous localization and mapping, navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, comparing their reported performance, and providing insights into their strengths and limitations. Moreover, we target the existing challenges of applying NeRF in autonomous robots, including real-time processing, sparse input views, and explore promising avenues for future research and development in this domain. We especially discuss potential of integrating advanced deep learning techniques like 3-dimensional Gaussian splatting, large language models, and generative artificial intelligence. This survey serves as a roadmap for researchers seeking to leverage NeRF to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
