{"title":"CUAHN-VIO: Content-and-uncertainty-aware homography network for visual-inertial odometry","authors":"Yingfu Xu, Guido C.H.E. de Croon","doi":"10.1016/j.robot.2024.104866","DOIUrl":null,"url":null,"abstract":"<div><div>Learning-based visual ego-motion estimation is promising yet not ready for navigating agile mobile robots in the real world. In this article, we propose CUAHN-VIO, a robust and efficient monocular visual-inertial odometry (VIO) designed for micro aerial vehicles (MAVs) equipped with a downward-facing camera. The vision frontend is a content-and-uncertainty-aware homography network (CUAHN). Content awareness measures the robustness of the network toward non-homography image content, <em>e.g.</em> 3-dimensional objects lying on a planar surface. Uncertainty awareness refers that the network not only predicts the homography transformation but also estimates the prediction uncertainty. The training requires no ground truth that is often difficult to obtain. The network has good generalization that enables “plug-and-play” deployment in new environments without fine-tuning. A lightweight extended Kalman filter (EKF) serves as the VIO backend and utilizes the mean prediction and variance estimation from the network for visual measurement updates. CUAHN-VIO is evaluated on a high-speed public dataset and shows rivaling accuracy to state-of-the-art (SOTA) VIO approaches. Thanks to the robustness to motion blur, low network inference time (<span><math><mo>∼</mo></math></span>23 ms), and stable processing latency (<span><math><mo>∼</mo></math></span>26 ms), CUAHN-VIO successfully runs onboard an Nvidia Jetson TX2 embedded processor to navigate a fast autonomous MAV.</div></div>","PeriodicalId":49592,"journal":{"name":"Robotics and Autonomous Systems","volume":"185 ","pages":"Article 104866"},"PeriodicalIF":5.2000,"publicationDate":"2025-03-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Autonomous Systems","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0921889024002501","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/22 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
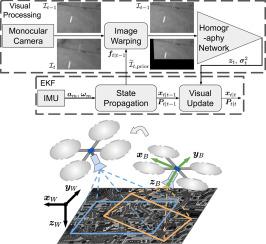
Learning-based visual ego-motion estimation is promising yet not ready for navigating agile mobile robots in the real world. In this article, we propose CUAHN-VIO, a robust and efficient monocular visual-inertial odometry (VIO) designed for micro aerial vehicles (MAVs) equipped with a downward-facing camera. The vision frontend is a content-and-uncertainty-aware homography network (CUAHN). Content awareness measures the robustness of the network toward non-homography image content, e.g. 3-dimensional objects lying on a planar surface. Uncertainty awareness refers that the network not only predicts the homography transformation but also estimates the prediction uncertainty. The training requires no ground truth that is often difficult to obtain. The network has good generalization that enables “plug-and-play” deployment in new environments without fine-tuning. A lightweight extended Kalman filter (EKF) serves as the VIO backend and utilizes the mean prediction and variance estimation from the network for visual measurement updates. CUAHN-VIO is evaluated on a high-speed public dataset and shows rivaling accuracy to state-of-the-art (SOTA) VIO approaches. Thanks to the robustness to motion blur, low network inference time (23 ms), and stable processing latency (26 ms), CUAHN-VIO successfully runs onboard an Nvidia Jetson TX2 embedded processor to navigate a fast autonomous MAV.
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
