Yawar Abbas, Naif Al Mudawi, Bayan Alabdullah, Touseef Sadiq, Asaad Algarni, Hameedur Rahman, Ahmad Jalal
{"title":"Unmanned aerial vehicles for human detection and recognition using neural-network model.","authors":"Yawar Abbas, Naif Al Mudawi, Bayan Alabdullah, Touseef Sadiq, Asaad Algarni, Hameedur Rahman, Ahmad Jalal","doi":"10.3389/fnbot.2024.1443678","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Recognizing human actions is crucial for allowing machines to understand and recognize human behavior, with applications spanning video based surveillance systems, human-robot collaboration, sports analysis systems, and entertainment. The immense diversity in human movement and appearance poses a significant challenge in this field, especially when dealing with drone-recorded (RGB) videos. Factors such as dynamic backgrounds, motion blur, occlusions, varying video capture angles, and exposure issues greatly complicate recognition tasks.</p><p><strong>Methods: </strong>In this study, we suggest a method that addresses these challenges in RGB videos captured by drones. Our approach begins by segmenting the video into individual frames, followed by preprocessing steps applied to these RGB frames. The preprocessing aims to reduce computational costs, optimize image quality, and enhance foreground objects while removing the background.</p><p><strong>Result: </strong>This results in improved visibility of foreground objects while eliminating background noise. Next, we employ the YOLOv9 detection algorithm to identify human bodies within the images. From the grayscale silhouette, we extract the human skeleton and identify 15 important locations, such as the head, neck, shoulders (left and right), elbows, wrists, hips, knees, ankles, and hips (left and right), and belly button. By using all these points, we extract specific positions, angular and distance relationships between them, as well as 3D point clouds and fiducial points. Subsequently, we optimize this data using the kernel discriminant analysis (KDA) optimizer, followed by classification using a deep neural network (CNN). To validate our system, we conducted experiments on three benchmark datasets: UAV-Human, UCF, and Drone-Action.</p><p><strong>Discussion: </strong>On these datasets, our suggested model produced corresponding action recognition accuracies of 0.68, 0.75, and 0.83.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1443678"},"PeriodicalIF":2.8000,"publicationDate":"2024-12-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11652500/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1443678","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Recognizing human actions is crucial for allowing machines to understand and recognize human behavior, with applications spanning video based surveillance systems, human-robot collaboration, sports analysis systems, and entertainment. The immense diversity in human movement and appearance poses a significant challenge in this field, especially when dealing with drone-recorded (RGB) videos. Factors such as dynamic backgrounds, motion blur, occlusions, varying video capture angles, and exposure issues greatly complicate recognition tasks.
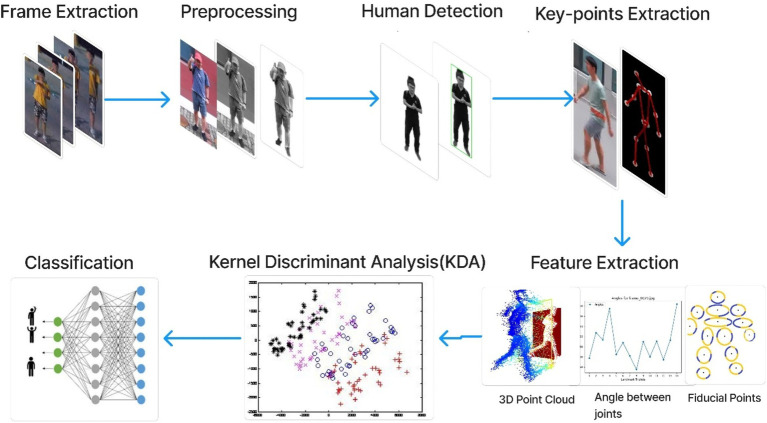
Methods: In this study, we suggest a method that addresses these challenges in RGB videos captured by drones. Our approach begins by segmenting the video into individual frames, followed by preprocessing steps applied to these RGB frames. The preprocessing aims to reduce computational costs, optimize image quality, and enhance foreground objects while removing the background.
Result: This results in improved visibility of foreground objects while eliminating background noise. Next, we employ the YOLOv9 detection algorithm to identify human bodies within the images. From the grayscale silhouette, we extract the human skeleton and identify 15 important locations, such as the head, neck, shoulders (left and right), elbows, wrists, hips, knees, ankles, and hips (left and right), and belly button. By using all these points, we extract specific positions, angular and distance relationships between them, as well as 3D point clouds and fiducial points. Subsequently, we optimize this data using the kernel discriminant analysis (KDA) optimizer, followed by classification using a deep neural network (CNN). To validate our system, we conducted experiments on three benchmark datasets: UAV-Human, UCF, and Drone-Action.
Discussion: On these datasets, our suggested model produced corresponding action recognition accuracies of 0.68, 0.75, and 0.83.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
