Joshua Yeuk Shun Tran , Rex Wang-Fung Mak , Kevin Ki-Wai Ho , Jonathan Patrick Ng , Cham Kit Wong , Gloria Yan-Ting Lam , Tsz Lung Choi , Michael Tim-Yun Ong , Patrick Shu-Hang Yung
{"title":"Novel application of an imageless robotic system in simultaneous unicompartmental knee arthroplasty and anterior cruciate ligament reconstruction","authors":"Joshua Yeuk Shun Tran , Rex Wang-Fung Mak , Kevin Ki-Wai Ho , Jonathan Patrick Ng , Cham Kit Wong , Gloria Yan-Ting Lam , Tsz Lung Choi , Michael Tim-Yun Ong , Patrick Shu-Hang Yung","doi":"10.1016/j.asmart.2024.12.001","DOIUrl":null,"url":null,"abstract":"<div><div>This technical note explores the novel use of an imageless robotic surgical system for simultaneous unicompartmental knee arthroplasty (UKA) and anterior cruciate ligament reconstruction (ACLR). Knee osteoarthritis (OA) and anterior cruciate ligament (ACL) insufficiency are common conditions that traditionally require separate management. The integration of robotic assistance offers enhanced precision in surgical procedures, addressing both medial compartment OA and ACL insufficiency in a single operation.</div><div>We present a case involving a 47-year-old patient with medial compartment osteoarthritis and complete ACL rupture. The patient underwent a simultaneous robotic-assisted UKA and ACLR using the CORI Surgical System (Smith&Nephew, London, UK). This approach enables accurate tibial tunnel placement and precise soft tissue balancing. The robotic system facilitates real-time gap assessment and balancing, reducing the risk of over- or under-constraint during ACL graft tensioning.</div><div>The procedure was performed with a standard medial parapatellar approach. Key steps included hamstring autograft harvesting, femoral and tibial tunnel creation, and robotic-assisted implant positioning. Post-operative rehabilitation allowed full weight-bearing by the third week.</div><div>This case represents the first reported instance of using an imageless robotic system for simultaneous UKA and ACLR, highlighting its potential to standardize and improve results in complex knee surgeries.</div><div>This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.</div></div>","PeriodicalId":44283,"journal":{"name":"Asia-Pacific Journal of Sport Medicine Arthroscopy Rehabilitation and Technology","volume":"39 ","pages":"Pages 37-40"},"PeriodicalIF":1.4000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11718410/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Asia-Pacific Journal of Sport Medicine Arthroscopy Rehabilitation and Technology","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2214687324000311","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/12/17 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
引用次数: 0
Abstract
This technical note explores the novel use of an imageless robotic surgical system for simultaneous unicompartmental knee arthroplasty (UKA) and anterior cruciate ligament reconstruction (ACLR). Knee osteoarthritis (OA) and anterior cruciate ligament (ACL) insufficiency are common conditions that traditionally require separate management. The integration of robotic assistance offers enhanced precision in surgical procedures, addressing both medial compartment OA and ACL insufficiency in a single operation.
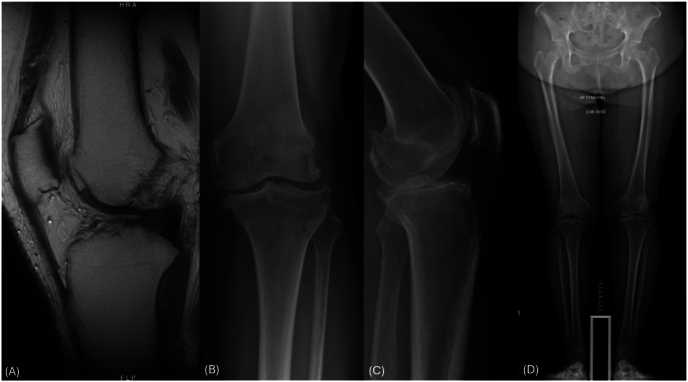
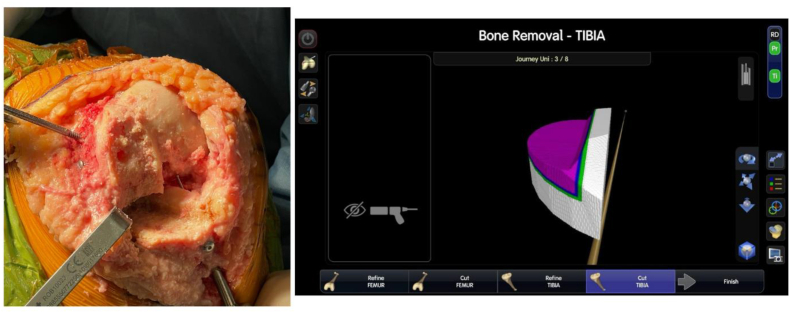
We present a case involving a 47-year-old patient with medial compartment osteoarthritis and complete ACL rupture. The patient underwent a simultaneous robotic-assisted UKA and ACLR using the CORI Surgical System (Smith&Nephew, London, UK). This approach enables accurate tibial tunnel placement and precise soft tissue balancing. The robotic system facilitates real-time gap assessment and balancing, reducing the risk of over- or under-constraint during ACL graft tensioning.
The procedure was performed with a standard medial parapatellar approach. Key steps included hamstring autograft harvesting, femoral and tibial tunnel creation, and robotic-assisted implant positioning. Post-operative rehabilitation allowed full weight-bearing by the third week.
This case represents the first reported instance of using an imageless robotic system for simultaneous UKA and ACLR, highlighting its potential to standardize and improve results in complex knee surgeries.
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
期刊介绍:
The Asia-Pacific Journal of Sports Medicine, Arthroscopy, Rehabilitation and Technology (AP-SMART) is the official peer-reviewed, open access journal of the Asia-Pacific Knee, Arthroscopy and Sports Medicine Society (APKASS) and the Japanese Orthopaedic Society of Knee, Arthroscopy and Sports Medicine (JOSKAS). It is published quarterly, in January, April, July and October, by Elsevier. The mission of AP-SMART is to inspire clinicians, practitioners, scientists and engineers to work towards a common goal to improve quality of life in the international community. The Journal publishes original research, reviews, editorials, perspectives, and letters to the Editor. Multidisciplinary research with collaboration amongst clinicians and scientists from different disciplines will be the trend in the coming decades. AP-SMART provides a platform for the exchange of new clinical and scientific information in the most precise and expeditious way to achieve timely dissemination of information and cross-fertilization of ideas.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
