{"title":"A survey of decision-making and planning methods for self-driving vehicles.","authors":"Jun Hu, Yuefeng Wang, Shuai Cheng, Jinghan Xu, Ningjia Wang, Bingjie Fu, Zuotao Ning, Jingyao Li, Hualin Chen, Chaolu Feng, Yin Zhang","doi":"10.3389/fnbot.2025.1451923","DOIUrl":null,"url":null,"abstract":"<p><p>Autonomous driving technology has garnered significant attention due to its potential to revolutionize transportation through advanced robotic systems. Despite optimistic projections for commercial deployment, the development of sophisticated autonomous driving systems remains largely experimental, with the effectiveness of neurorobotics-based decision-making and planning algorithms being crucial for success. This paper delivers a comprehensive review of decision-making and planning algorithms in autonomous driving, covering both knowledge-driven and data-driven approaches. For knowledge-driven methods, this paper explores independent decision-making systems, including rule based, state transition based, game-theory based methods and independent planing systems including search based, sampling based, and optimization based methods. For data-driven methods, it provides a detailed analysis of machine learning paradigms such as imitation learning, reinforcement learning, and inverse reinforcement learning. Furthermore, the paper discusses hybrid models that amalgamate the strengths of both data-driven and knowledge-driven approaches, offering insights into their implementation and challenges. By evaluating experimental platforms, this paper guides the selection of appropriate testing and validation strategies. Through comparative analysis, this paper elucidates the advantages and disadvantages of each method, facilitating the design of more robust autonomous driving systems. Finally, this paper addresses current challenges and offers a perspective on future developments in this rapidly evolving field.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1451923"},"PeriodicalIF":2.8000,"publicationDate":"2025-02-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11876185/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1451923","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
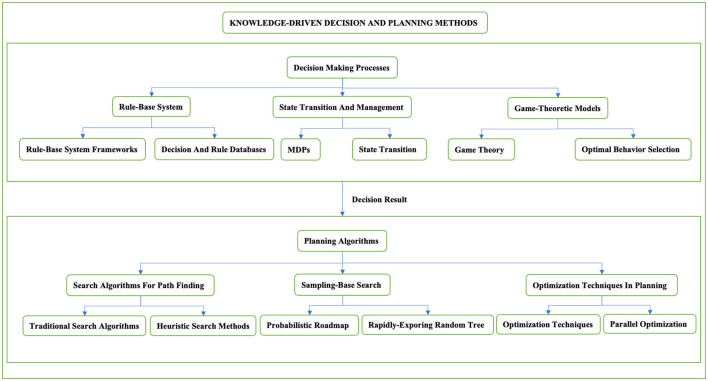
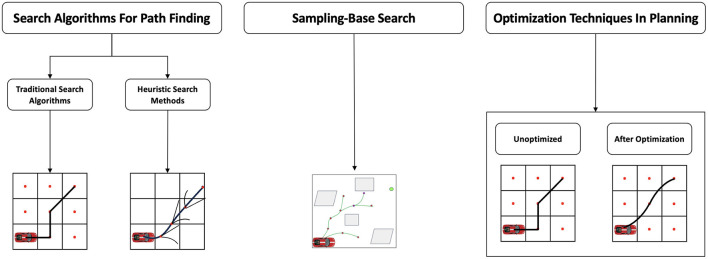
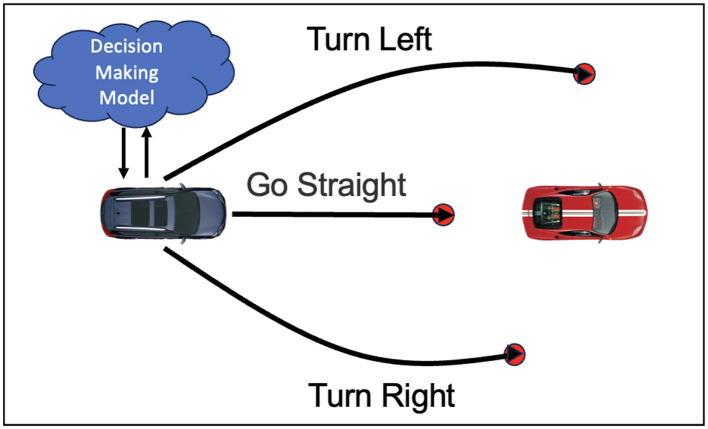
Autonomous driving technology has garnered significant attention due to its potential to revolutionize transportation through advanced robotic systems. Despite optimistic projections for commercial deployment, the development of sophisticated autonomous driving systems remains largely experimental, with the effectiveness of neurorobotics-based decision-making and planning algorithms being crucial for success. This paper delivers a comprehensive review of decision-making and planning algorithms in autonomous driving, covering both knowledge-driven and data-driven approaches. For knowledge-driven methods, this paper explores independent decision-making systems, including rule based, state transition based, game-theory based methods and independent planing systems including search based, sampling based, and optimization based methods. For data-driven methods, it provides a detailed analysis of machine learning paradigms such as imitation learning, reinforcement learning, and inverse reinforcement learning. Furthermore, the paper discusses hybrid models that amalgamate the strengths of both data-driven and knowledge-driven approaches, offering insights into their implementation and challenges. By evaluating experimental platforms, this paper guides the selection of appropriate testing and validation strategies. Through comparative analysis, this paper elucidates the advantages and disadvantages of each method, facilitating the design of more robust autonomous driving systems. Finally, this paper addresses current challenges and offers a perspective on future developments in this rapidly evolving field.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
