Georgi Rusev, Svetlozar Yordanov, Simona Nedelcheva, Alexander Banderov, Fabien Sauter-Starace, Petia Koprinkova-Hristova, Nikola Kasabov
{"title":"Decoding Brain Signals in a Neuromorphic Framework for a Personalized Adaptive Control of Human Prosthetics.","authors":"Georgi Rusev, Svetlozar Yordanov, Simona Nedelcheva, Alexander Banderov, Fabien Sauter-Starace, Petia Koprinkova-Hristova, Nikola Kasabov","doi":"10.3390/biomimetics10030183","DOIUrl":null,"url":null,"abstract":"<p><p>Current technological solutions for Brain-machine Interfaces (BMI) achieve reasonable accuracy, but most systems are large in size, power consuming and not auto-adaptive. This work addresses the question whether current neuromorphic technologies could resolve these problems? The paper proposes a novel neuromorphic framework of a BMI system for prosthetics control via decoding Electro Cortico-Graphic (ECoG) brain signals. It includes a three-dimensional spike timing neural network (3D-SNN) for brain signals features extraction and an on-line trainable recurrent reservoir structure (Echo state network (ESN)) for Motor Control Decoding (MCD). A software system, written in Python using NEST Simulator SNN library is described. It is able to adapt continuously in real time in supervised or unsupervised mode. The proposed approach was tested on several experimental data sets acquired from a tetraplegic person. First simulation results are encouraging, showing also the need for a further improvement via multiple hyper-parameters tuning. Its future implementation on a neuromorphic hardware platform that is smaller in size and significantly less power consuming is discussed too.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 3","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-03-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11940436/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10030183","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
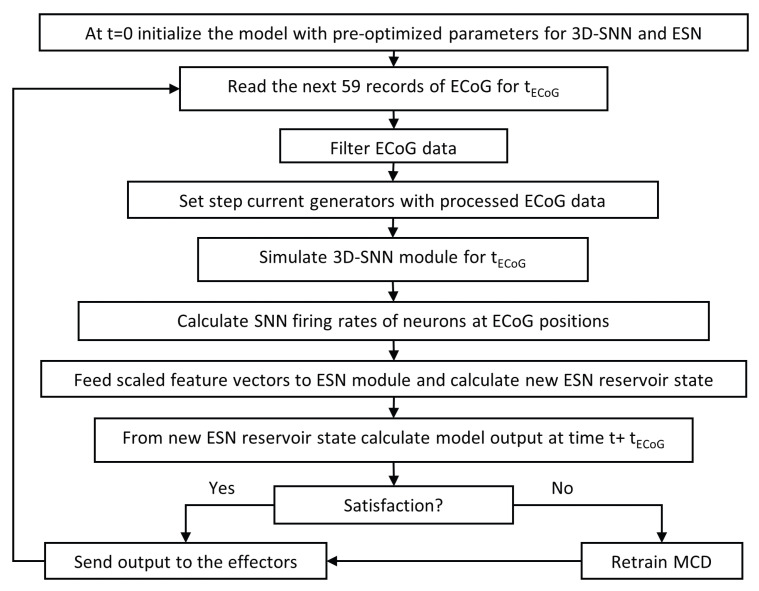
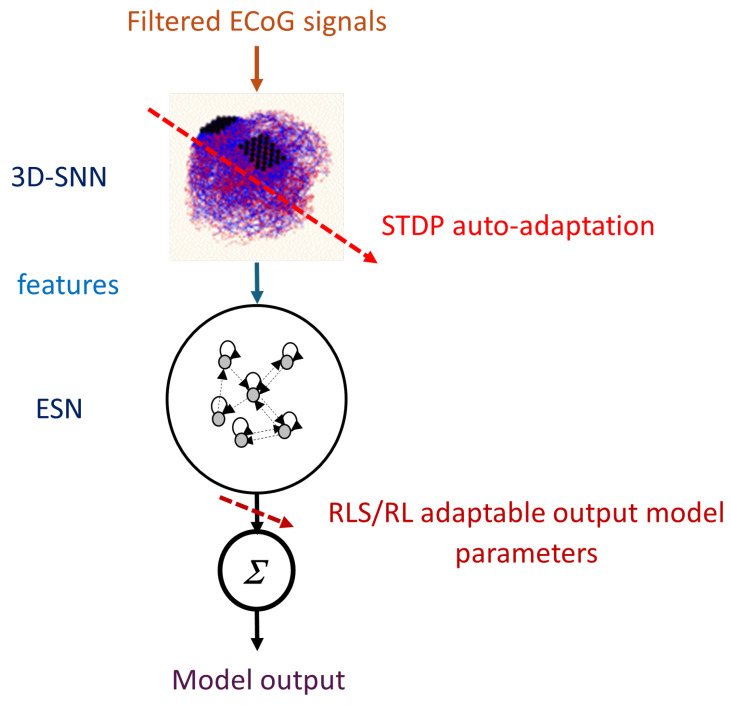
Current technological solutions for Brain-machine Interfaces (BMI) achieve reasonable accuracy, but most systems are large in size, power consuming and not auto-adaptive. This work addresses the question whether current neuromorphic technologies could resolve these problems? The paper proposes a novel neuromorphic framework of a BMI system for prosthetics control via decoding Electro Cortico-Graphic (ECoG) brain signals. It includes a three-dimensional spike timing neural network (3D-SNN) for brain signals features extraction and an on-line trainable recurrent reservoir structure (Echo state network (ESN)) for Motor Control Decoding (MCD). A software system, written in Python using NEST Simulator SNN library is described. It is able to adapt continuously in real time in supervised or unsupervised mode. The proposed approach was tested on several experimental data sets acquired from a tetraplegic person. First simulation results are encouraging, showing also the need for a further improvement via multiple hyper-parameters tuning. Its future implementation on a neuromorphic hardware platform that is smaller in size and significantly less power consuming is discussed too.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
